|
一、决赛时间
2014年12月6日-7日
开幕式:8:00—9:00 (6日)
比赛时间:上午 9:00—12:30 下午 13:00—18:00(6日)
上午 8:00—12:30(7日)
二、队伍数量
32个团队入围决赛,每个团队不超过3名学生,不超过2名指导教师。
三、比赛说明
(一)本次团体赛决赛采用现场设备上机操作方式,组委会提供比赛设备,参赛团队自带笔记本电脑进行程序导入及调试。
(二)决赛32个团队,两两PK,获胜者进入下一轮,从而决出冠军。决赛现场各团队指导教师在场外等候。
(三)比赛时间安排(比赛现场若有不可预见情况出现,以现场安排时间为准)
|
时间(以现场为准)
|
内容
|
|
12月6日
|
|
8:00--9:00
|
队伍抽签,赛前准备
|
|
9:00--10:05
|
32进16 第一轮比赛
|
|
10:05--11:15
|
32进16 第二轮比赛
|
|
11:15--12:25
|
32进16 第三轮比赛
|
|
12:25--13:30
|
午休
|
|
13:30--14:40
|
32进16 第四轮比赛
|
|
14:40--15:40
|
32进16 比赛打平队伍加赛
|
|
15:40--16:50
|
16进8 第一轮比赛
|
|
16:50--18:00
|
16进8 第一轮比赛
|
|
18:00--18:30
|
16进8 比赛打平队伍加赛
|
|
12月7日
|
|
8:00--9:00
|
8进4 比赛
|
|
9:00--9:30
|
8进4 比赛打平队伍加赛
|
|
9:30--10:40
|
半决赛 比赛
|
|
10:40--11:10
|
半决赛 比赛打平队伍加赛
|
|
11:10--12:10
|
冠军赛 比赛
|
|
12:10--12:30
|
决赛 比赛打平队伍加赛
|
(四)每组比赛流程
|
时间
|
环节
|
具体内容
|
|
5分钟
|
入场
|
参赛团队入场,找到自己团队相应的机器设备
|
|
5分钟
|
宣布比赛规则
|
裁判长宣读比赛规则,参赛学员确认遵守比赛规则并签字;期间不允许选手提前操作设备,否则视为违规,取消比赛资格;
|
|
20分钟
|
机器调试
|
参赛队伍将编写好的程序灌入设备中,慢速测试点动,随后各自调试自己的进攻、防守程序;
|
|
10分钟
|
上半场比赛
|
根据比赛规进行比赛
|
|
20分钟
|
攻守互换
|
按比赛规定所有团队进行程序调试
|
|
10分钟
|
下半场比赛
|
交换场地,根据比赛规则进行比赛
|
|
30分钟
|
加时赛
|
比赛如遇打平情况,则进行加赛
|
注:上电之后,请勿触碰相机及镜头,以免有静电情况发生。
四、比赛规则
(一)决赛规则说明
1、比赛采用对抗形式:每队分别射门5球,守门5球,每射进一球计1分,守住一球计1分,以分高者胜出。(视觉需由参赛队自行设置)
2、当比赛结果为平局时,双方各击打一球,球停下后离底线距离近者胜出。
3、每射一球总共用时2分钟,超出各自规定时间则判对方得分。计时开始后,由射门方先将球放到固定位置(30S),示意完成后,守门方点击防守按键(30S),示意可以进行射门,再由射门方进行射门(30S),守门结束后,射门方和守门方均将机械手回机械原点(30S)。
4、在换边及比赛结束后,射门方与守门方需清空各自NJ程序及视觉程序。
(二)犯规及扣分标准
1、射门及守门方均不得移动 桌面,违规黄牌警告,判移动桌面方半场负,对方得5分。
2、射门方不得移动视觉检测设备(包括镜头、相机线缆、控制器等)、显示器、光源及支架,违规黄牌警告,判半场负,对方得5分。
3、射门及守门方均不得触碰对方机械手,违规黄牌警告,判移动对方机械手方半场负,对方得5分。
4、射门及守门机械手运行时均不得超出机械手活动范围并触碰到光源或场地,违规黄牌警告,判半场负,对方得5分。
注:得到二张黄牌后,换红牌罚出场,直接取消比赛资格。
(三)射门及守门要求
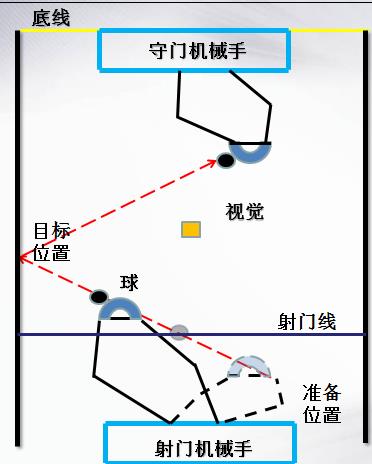
射门:
1、如图在机械手活动范围内,可以向任意方向,以小于3000mm/s速度;小于150000mm/s2加减速度;小于1500000mm/s3JERK值推射目标球。
2、在射门线上已标注坐标,球可放在射门线的任意位置作为射门起始位置(射门线仅供参考,可将球放在任意位置进行射门),并手动设置目标位置,使球向目标位置自动进攻(可反弹进攻也可直接进攻)。
3、进攻目的:使球躲过机械手阻拦,并接触底线
注:1、当守门方示意守门准备完成后,请在30S内将球击出。
2、根据现场实际情况可能存在使用最大速度、加减速及JERK值时产生机械移位,请测试合理的速度、加减速及JERK值进行射门以避免机械移动后产生的坐标位置变化。
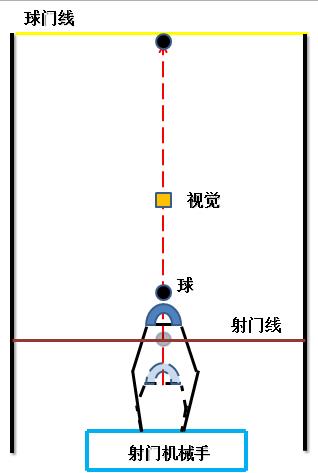
守门:
1.视觉实时拍摄场地,获取目标球位置坐标,并且通过网络把坐标实时发送给PLC。
2.在PLC中编写算法,实时预判目标球的运动轨迹,并计算出机械手的拦截位置。
3.在机械手活动范围内(X:-230至230;Y:-292.35到-440)可以向任意方向,以小于3000mm/s速度;小于150000mm/s2加减速度;小于1500000mm/s3JERK值拦截目标球。
4、因反射后可能存在旋转现象,反射角不等于入射角,需通过上机实验,设置反射的偏移值。
5、守门目的:拦截目标球,使其不接触到底线。
注:1、在射门方将球放到固定位置,并示意放完球后,点击自动守门键,在射门完成前不可再做其他操作。
2、根据现场实际情况可能存在使用最大速度、加减速及JERK值时产生机械移位,请测试合理的速度、加减速及JERK值进行守门以避免机械移动后产生的坐标位置变化。
(四)平分后附加赛要求
1、由抽签决定哪方先击打,击打方可先调试10分钟,后将球放于任意位置进行击打;一方击打完后由另一方调试并击打。
2、如图在机械手活动范围内,可以向任意方向,以小于3000mm/s速度;小于150000mm/s2加减速度;小于1500000mm/s3JERK值击打目标球。
3、在射门线上已标注坐标,球放在射门线的任意位置作为击打起始位置(射门线仅供参考,可将球放在任意位置进行击打)
4、击打目的:使球停下位置尽量接近底线(可反射)
5、测量方法:使用直尺测量。
(五)评审说明
1、现场评审委员:由非带队评审教师与OMRON工程师组成
2、评审标准:按照比赛规则进行计分、扣分。
l IAAT项目微博:IAAT项目
l IAAT项目微信号:IAAT
 
关于IAAT项目
为认真贯彻国务院《关于大力发展职业教育的决定》(国发[2005]35号)、教育部《国家教育事业发展“十二五”规划纲要》和《国家中长期教育改革和发展规划纲要(2010-2020)》的有关文件精神,落实《中共中央国务院关于进一步加强人才工作的决定》,全面加强专业技术人才队伍建设,按照《中华人民共和国行政许可法》的相关规定,发挥全国各行各业,专业技术培训与就业相结合的优势,培养符合各级行政和企事业单位所需要,具备从事相关职业并能准确掌握和使用本行业知识技术的高素质人才。教育部教育管理信息中心于2010年11月正式启动“全国工业自动化人才认证培训”项目(简称IAAT项目)。
该项目以培养技能型、创新型工作自动化人才为目标,以提高自动化相关专业学生的就业竞争力为宗旨,以及是跟踪自动化领域最新进展、建立科学、系统、专业、先进的课程资源为己任。按照工业自动化行业领域岗位需求开展高技术自动化人才的培养、考核、认定等工作,并最终完成人才就业的定向输送工作。
IAAT项目管理办公室官方网站:中国教育资源网(http://www.cern.net.cn)、IAAT项目官方网站(http://www.iaat.org.cn),工控网(http://www.gongkong.com)将全面参与IAAT项目的宣传报导。
|