


基于无线SAW压力传感器的FADS研究
1 引 言
FADS采用分布在飞行器前端周线(也可机翼两侧)不同位置上的压力传感器阵列测得压力,通过计算间接得到动静压,从而获得真空速、马赫数、气压高度等大气数据。NASA的Dryden飞行研究中心在19世纪60年代开始了对嵌入式大气数据系统的研究。这种传感系统被应用于F-14,F/A-18,X-31,X-33,X-34以及X-38等诸多飞行器上,但其使用的是传统的压力传感器,需要冗长的线缆等,不利于在较小型的武器弹药上使用。
无线声表面波压力传感器具有体积小、能无线测量的优点,因而嵌入式大气数据系统使用无线声表面波压力传感器,就能将嵌入式大气数据系统运用到较小型的武器弹药上,与小型廉价的捷联惯导进行组合,可组成廉价但精度较高的组合导航系统,可方便的用于提高小型弹药的命中精度等。
2 基本原理
FADS一般安装在飞行器前端,为了不影响雷达和火控装置的安装,也有将FADS安装在机翼前端。F-14的FADS由23个压力传感器组成,安装在机身前端。X-33的FADS系统则由6个压力传感器组成,安装在机身前端。压力传感器的数目并没有固定的规定。在F-14飞机上,其FADS的压力传感器布局如图1所示。

FADS系统中压力传感器数目越多,其容错性能越好,但系统的计算就越复杂,系统性能要求就越高。但由于测量攻角和侧滑角需相应的压力差,因而在中心点的周围必须有相对称的压力测量点。
FADS系统的空气动力学模型把位流模型与修正的牛顿流模型(前者主要适用于亚音速条件,后者主要适用于超音速条件)与一个修正系数ε相结合,形成了不同马赫情况下的带补偿的空气动力学模型。ε的数值是在综合考虑了压缩效应、气动外形、系统影响等因素而选取的。在飞行中,可以将其看成攻角、侧滑角和马赫数的函数,其函数关系可以在飞行前确定。
在此省略空气动力学的推导过程,给出FADS系统完整的空气动力学模型

式中:pi为第i(i=1,2…23)个压力传感器(简称i点)所测得的压强;qc为动压;p∞为静压;M∞为马赫数;ε为形压系数;α为攻角;β为侧滑角;φi为i点的圆周角;λi为i点的圆锥角;θi为i点的入射角(该点的曲面法线方向与来流速度矢量的夹角);g函数是一个确定的单调函数。通过对压力点压力的测量以及相应的算法,可以得到动、静压的值、马赫数、攻角和测滑角,通过这些值又能推算气压高度和真空速等大气参数。
3 无线SAW压力传感器
在飞行器前端安装FADS,需要体积很小的压力传感器进行点测。在文献[4],[5]中报道的无线SAW压力传感器都是通过延迟线实现的,延迟线的插入损耗以及传播损耗较大,影响SAW压力传感器遥测的距离,且SAW延迟线形状扁长,不适宜安装于飞行器前端对一个点的压力进行测量。通过图2所示的SAW压力传感器的结构可改变SAW压力传感器的形状,且能增加SAW压力传感器无线测量的距离。
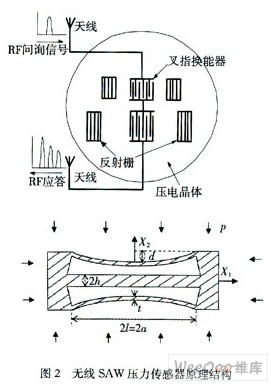
不同于声表面波延迟线结构的SAW压力传感器,图2所示的结构采用两个单端谐振器并联。SAW谐振器在谐振时瑞利波通过反射栅形成多次叠加,其能量也多次叠加,因而相对减少了传播损耗和插入损耗,具有较高高的Q值。同时SAW谐振器灵敏度高,精确度高,且能长时间保持稳定。利用这种结构设计来无线测量压力,能减少SAW压力传感器的传播损耗和插入损耗,因而这种原理结构具有良好的应用潜力。
当传感器表面有压力作用时,无线SAW压力传感器的压电薄膜就会产生形变,薄膜材料的应变会使得声表面波传播速度发生变化,从而使声表面波的中心谐振频率发生变化。通过无线检测SAW压力传感器的中心谐振频率变化,就能得到压力变化的数据。假设温度对两个单端谐振器的中心谐振频率影响很小,则两谐振器中心频率差的变化与所测压力之间的关系式可表示为

式中,S1和S2分别表示单端谐振器1和单端谐振器2的压力灵敏系数,与单端谐振器和隔膜的参数有关。压力灵敏系数可表示为

式中:R为隔膜的半径;h为隔膜的厚度;E为杨氏模量;μs为泊松比;r1和r2为两单端谐振器基片材料对机械扰动的线性系数。
通过无线测量SAW两个谐振器中心频率差的变化就能得到压力值,极大地提高了嵌入式大气数据系统的应用灵活性。
4 无线测量结构
在嵌入式大气数据系统中,SAW压力传感器无线测量的优点可提高其应用的灵活性。图3所示为SAW压力传感器无线测量结构。

整个无线测量系统由信号询问与信号接收两部分电路组成。信号发送装置由参考振荡器、RF脉冲发生器以及接收/发送(T/R)转换开关组成;信号接收装置由积分下变频转换器、两路A/D转换器组成。信号处理器模块将经过A/D转化后得到的数据进行处理,从中得到相位正交的I路信号和Q路信号,对I路信号和Q路信号处理就能得到SAW传感器由于物理变化而产生的频率和相位变化信息,同时信号处理器模块产生脉冲控制信号以及接收/发送转换信号,以对接收发送的转换进行协调。
由于信号收发电路发射脉冲询问信号后,脉冲信号在传播、SAW传感器中处理以及返回过程中都需要时间,所以必须定义相互独立的发送和接收间隔时间,通过接收/发送开关进行转换。参考振荡器在脉冲信号发送时产生询问信号,而在接收信号时为积分下变频提供本振参考信号。经下变频转换后,由双路A/D转换器进行数字化,并通过可编程逻辑器件对信号的接收发送进行控制。信号处理后与惯导系统相联,组成小型的组合导航系统。
5 仿真结果
可通过SAW单端谐振器的等效电路对SAW压力传感器的整体性能进行分析,图4为SAW单端谐振器的等效电路。

图中:C1表示基片弹性引起的动态电容;L1是基片惯性引起的动态电感;R1是阻尼引起的动态电阻;C0是叉指换能器的静电容。SAW压力传感器由两个单端谐振器并联得到,通过HP Eesoft软件进行仿真,可得两谐振器的回波导纳幅值与频率的关系。仿真结果如图5所示。

在图5中可以看出,两SAW谐振器有两个中心谐振频率,分别为434 MHz和434.4 MHz。这两个频率都在ISM标准无线频率测量范围之中,可有效进行无线测量。




 投诉建议
投诉建议
提交

超越传统直觉,MATLAB/Simulink助力重型机械的智能化转型

新大陆自动识别精彩亮相2024华南国际工业博览会

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会