


基于CompactRIO的直流无刷电机控制系统
在工农业以及航空航天等领域,电机得到了广泛的应用。在实际应用时,电机的转速控制显得尤为重要。 直流电机具有优良的性能,调速方便、调速范围宽、低速性能好、运行平稳,可实现频繁的无级快速起动、制动和反转,被广泛应用于工业和民用领域。传统的直流电机采取电刷和换相器,以机械方式进行换相从面导致电机容量有限、噪声大、容易产生火花、无线电干扰、可靠性差等缺点。而直流无刷电机使用电子换相器取代了电刷和换相器,从而解决了上述问题,同时又保持了直流电机的优点。 随着电子技术的发展,电子系统朝着集成化的方向发展。NI公司推出的CompactRIO是一种小巧而坚固的工业化控制和采集系统,它是面向嵌入式控制应用的高性能和高可靠性可编程自动化控制器。为嵌入式控制应用提供了一个开放的平台。在上海技术物理研究所研制的最新一代机载多光谱扫描仪中,采用CompactRIO作为嵌入式系统架构,对扫描电机(三相直流无刷电机)的转速控制、黑体参考源的温度控制和多通道图像数据同步采集进行集成化设计,既减小了系统的体积,又提高了系统的可靠性。笔者将对基于CompactRIO的直流无刷电机转速的嵌入式控制行介绍。 1 直流无刷电机 现在通用的直流无刷电机有带位置传感器的直流无刷电机和无位置传感器的直流无刷电机,其相应的控制方法也有所区别。本系统采用的是带位置传感器的三相直流无刷电机(后面简称直流无刷电机)。直流无刷电机由电机转子、定子、3个绕组、霍尔传感器组成。霍尔传感器安装在转子后面,随着转子的旋转输出方波信号;3路霍尔信号的电平组合将决定3个绕组线圈中电流的方向。 2 系统介绍 直流无刷电机控制系统的核心包括CompactRIO和功放板,系统框图如图1所示。 
CompactRIO根据直流无刷电机的特定时序以及霍尔传感器信号来产生控制信号。控制信号经功放板放大后变为控制电机的三相信号。上位机可以与CompactRIO进行双向通信,进行转速设置和实际转速显示。 3 硬件部分 控制系统硬件部分主要由2个模块组成:全桥功放板和CompactRIO硬件架构。 3.1 CompactRIO硬件架构 CompactRIO是控制系统的核心,其拥有的FPGA门数可达几百万门以上,并且拥有丰富的可扩展I/O资源,可以在FPGA层面上使用LsbVIEW进行图形化编程。 CompactRIO由实时控制器,带插槽的可重新配置机箱以及各种I/O模块组成。 3.2 功放板 由于直流无刷电机本身没有电刷,所以需要电子换相。电子换相时电流方向按照一定规律变化。绕组中的电流有可能正流也有可能反流。而H桥功放正好可以满足此需求。 严格意义上讲。H桥功放只能导通两相,所以三相电机工作时还需要加个半桥,变为全桥功放,是扩展后的H桥功放。全桥功放由6个NMOS管组成,可以控制三相输出。NMOS管组成的全桥在其前端需要加额外驱动器进行电压的变换,以保证MOS管的完全导通。 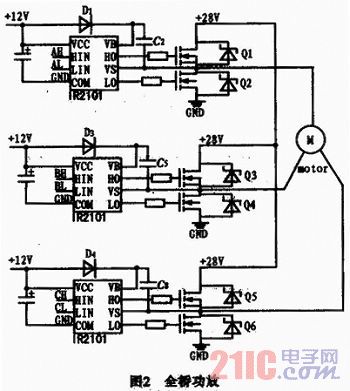
电机的供电源是 28 V,下桥MOS管的导通电压VGS(th),上桥MOS管的导通电压为28V VGS(th)。而CompactRIO输出的信号是TTL电平,显然无法满足全桥工作时的电平需求。所以功放板上的MOS管驱动器采用自举电路对上桥MOS管栅极进行升压。 系统中使用了一款高压驱动芯片,能驱动上下2个NMOS管。VB和VS为高压靖供电;HO为高压端驱动输出;VCC和COM为低压端驱动供电;LO为低压端驱动输出;VCC为芯片供电。驱动芯片控制的上下桥臂交替导通。当下轿臂导通时,上桥臂关断,VS脚的电位等予Q2管的饱和导通压降,基本接近COM端电位,此时VCC通过自举二极管D1对自举电容C2充电使其接近VCC电压。当Q2关断时,VS端的电压就会升高,由于电容两端的电压不能突变,因此VB~VS VCC。当Q1开通时,C2作为一个浮动的电压源驱动Q1;而C2在Q1开通期间损失的电荷在下一个周期得到补充。所以该自举电路其实是利用了VS在高低电平之间的摆动来实现的。而直流无刷电机一般都是采用脉宽调制波,符合其电平摆动的要求。 电路中D1和C2是自举电路的关键器件。D1是快恢复二极管,其作用是当Q1关断时为C2充电提供正向电流通道,当Q1开通时,VB端电压会被抬高,而D1可以阻止电流流入VCC,达到保护电源的目的。C2是自举电容,其容值的选取受电路的器件和电路工作频率影响,其计算公式如式(1): 
Qc为上桥MOS管的MOSFET的栅极电荷;IQBS为上桥驱动的静态电流;ICCBS为自举电容的漏电流;QLS为驱动IC中电平转换电路的电荷要求;VLS为下桥器件压降;VF为自举二极管正向压降。 
由公式可以得出,在使用自举电路时应根据所选用的器件的参数以及电路的最低工作频率来确定电容C的最小取值。实际应用中选取的电容值应为理论计算值的两倍以上。 4 软件部分 使用LabVIEW对CompactRIO进行图形化编程。软件设计部分主要包括电机测速模块、控制量计算及脉宽调制模块,时序产生模块。 4.1 电机测速模块 直流无刷电机转速与霍尔信号的频率以及线圈的极对子数的对应关系如下:n=f/p。其中n代表转速,f代表霍尔信号的频率,p代表电机的极对子数。通过测量某一路霍尔信号即可测得电机的转速。 CompactRIO数字I/O获取某一路霍尔信号,测量其相邻两个上升沿之间的时间就可以计算出霍尔信号的频率,进而得到电机的转速,或者通过计算在短时间内获得的霍尔信号脉冲数量。 在需要获得精确转速的情况下,一般使用码盘测速。码盘在电机转动一圈时可以产生几千个脉冲,在如此大数量的采样脉冲下,引起的误差会减小很多。 4.2 控制量计算及脉宽调制模块 电机的转速控制通过脉宽调制来实现。CompactRIO根据转速设定值和实际值之间的误差来计算输出相应的控制量,该控制量经过脉宽调制模块后产生PWM波。PWM波在一个周期内,其高电平的占空比受控制量计算模块输出的控制量调节,控制量越大,高电平的比例越大。 控制量计算模块的核心是PID控制算法。PID算法是工业领域中最常用的控制算法,广泛应用于温度控制、流量控制转速控制等。PID算法的核心是P参数(比例调节)、I参数(积分调节)、D参数(微分调节),PID控制器的输入参量是过程变量和设置点。这里的过程变量就是实际转速值,设置点就是设定的转速值。PID控制器根据预先设置好的P、I、D参数,利用PID算法计算出一个控制量,该控制量作用于系统后迫使实际转速向着设定转速逼近,最终稳定在设定转速上。PID算法由公式(2)表达: 
其中e=SP-PV,SP是设定点,PV是过程变量;KC是控制增益,代表比例调节作用;Ti是积分时间,代表着积分调节作用;Td是微分时间,代表着微分调节作用。 4.3 时序产生模块 直流无刷电机正常旋转时需要在绕组线圈中按照一定时序注入电流,线圈电流方向的改变是通过改变三相输出端的极性来实现的。因此在不同的霍尔信号下,需要输入相对应的控制信号(见表1)。A、B、C分别为电机的霍尔信号。AH、AL、BH、BL、CH、CL分别为三相控制信号。电机的转速是通过PWM波的脉冲宽度的大小来控制的。具体实现方法是,在CompactRIO中将脉宽调制波与电机的下桥驱动信号在逻辑上“相与”。图4是根据电机时序确定的控制信号图,图5是经PWM波调制后的控制信号图。 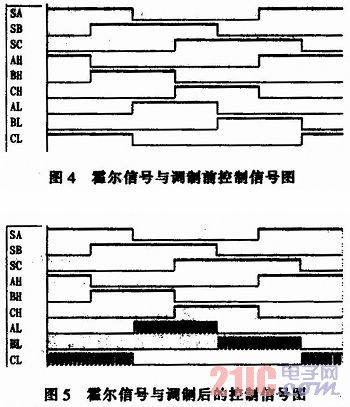
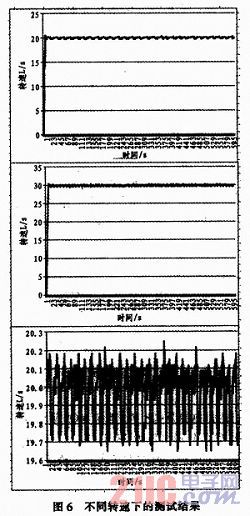
5 实验结果与分析 直流无刷电机在空载情况下进行测试。在上位机进行转速设置,在CompactRIO中对转速进行采样,采样速率为每秒一次,采样次数为600次。测试结果如图6所示。 图6中的上、中部分别是转速为20L/s、30L/s下测得的结果。可以看出电机从启动至转速稳定所需要的时间很短。即系统对转速设定值变化时的反应速度很快。 图6中的下部是设置转速为20 L/s,当转速稳定后的统计数据。从图中可以看出电机的实际转速在设定值附近摆动,其平均值基本等于设定值,转速稳定度达到�1.5%。 6 结束语 文章介绍了直流电机的构成,详细介绍了一种基于CompactRIO的直流无刷电机控制系统,从硬件和软件设计上进行分析,并对自举电路的工作方式和参数选择做了分析。最后对该系统进行了转速测试,结果表明,直流无刷电机的转速稳定度达到1.5%,符合机载多光谱扫描仪扫描电机的转速稳定度要求。




 投诉建议
投诉建议
提交

超越传统直觉,MATLAB/Simulink助力重型机械的智能化转型

新大陆自动识别精彩亮相2024华南国际工业博览会

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会