


机器视觉系统中常用工业相机的分类
根据不同感光芯片划分
我们知道感光芯片是摄像机的核心部件,目前摄像机常用的感光芯片有CCD和CMOS两种:
1.CCD摄像机,CCD称为电荷耦合器件,CCD实际上只是一个把从图像半导体中出来的电子有组织地储存起来的方法。
2.CMOS摄像机,CMOS称为“互补金属氧化物半导体”,CMOS实际上只是将晶体管放在硅块上的技术,没有更多的含义。
尽管CCD表示“电荷耦合器件”而CMOS表示“互补金属氧化物半导体”,但是不论CCD或者CMOS对于图像感应都没有用,真正感应的传感器称做“图像半导体”,CCD和CMOS传感器实际使用的都是同一种传感器“图像半导体”,图像半导体是一个P N结合半导体,能够转换光线的光子爆炸结合处成为成比例数量的电子。电子的数量被计算信号的电压,光线进入图像半导体得越多,电子产生的也越多,从传感器输出的电压也越高。
因为人眼能看到1Lux照度(满月的夜晚)以下的目标,CCD传感器通常能看到的照度范围在0.1~3Lux,是CMOS传感器感光度的3到10倍,所以目前一般CCD摄像机的图像质量要优于CMOS摄像机。
CMOS可以将光敏元件、放大器、A/D转换器、存储器、数字信号处理器和计算机接口控制电路集成在一块硅片上,具有结构简单、处理功能多、速度快、耗电低、成本低等特点。CMOS摄像机存在成像质量差、像敏单元尺寸小、填充率低等问题,1989年后出现了“有源像敏单元”结构,不仅有光敏元件和像敏单元的寻址开关,而且还有信号放大和处理等电路,提高了光电灵敏度、减小了噪声,扩大了动态范围,使得一些参数与CCD摄像机相近,而在功能、功耗、尺寸和价格方面要优于CCD,逐步得到广泛的应用。CMOS传感器可以做得非常大并有和CCD传感器同样的感光度,因此非常适用于特殊应用。CMOS传感器不需要复杂的处理过程,直接将图像半导体产生的电子转变成电压信号,因此就非常快,这个优点使得CMOS传感器对于高帧摄像机非常有用,高帧速度能达到400到100000帧/秒。
按输出图像信号格式划分
模拟摄像机
模拟摄像机所输出的信号形式为标准的模拟量视频信号,需要配专用的图像采集卡才能转化为计算机可以处理的数字信息。模拟摄像机一般用于电视摄像和监控领域,具有通用性好、成本低的特点,但一般分辨率较低、采集速度慢,而且在图像传输中容易受到噪声干扰,导致图像质量下降,所以只能用于对图像质量要求不高的机器视觉系统。常用的摄像机输出信号格式有:
PAL(黑白为CCIR),中国电视标准,625行,50场
NTSC(黑白为EIA),日本电视标准,525行,60场
SECAM
S-VIDEO
分量传输
数字摄像机
数字摄像机是在内部集成了A/D转换电路,可以直接将模拟量的图像信号转化为数字信息,不仅有效避免了图像传输线路中的干扰问题,而且由于摆脱了标准视频信号格式的制约,对外的信号输出使用更加高速和灵活的数字信号传输协议,可以做成各种分辨率的形式,出现了目前数字摄像机百花齐放的形势。常见的数字摄像机图像输出标准有:
IEEE1394
USB2.0
DCOM3
RS-644 LVDS
Channel Link LVDS
Camera Link LVDS
千兆网
按像元排列方式划分
面阵摄像机
面阵摄像机是我们常见的形式,其像元是按行列整齐排列的,每个像元对应图像上的一个像素点,我们一般所说的分辨率就是指像元的个数。需要指出的是我们计算机中的彩色图像一般是每个像素点由R、G、B三个值来表示,但我们一般的彩色摄像机却并不是这样的,下面分别进行介绍:
黑白摄像机,每个像素点对应一个像元,该像元对于各种波长的光具有较一致的敏感度,采集得到的只是每个像素点的灰度值。
采用BAYER转化的单片彩色摄像机,这种摄像机的每个像素点实际只对应R、G、B三种之一的像元,R、G、B三种像元按一定的规律排列,我们实际所得到的每个像素点的R、G、B三原色的数值是根据该像素点及其周围若干点的三色数值进行BAYER插分计算而来的,所以这种摄像机所得到的图像往往不能得到很好的彩色效果,尤其是对应边缘位置会有较明显的色彩失真和细节的丢失。目前我们常见的彩色摄像机一般是这种形式的,其价格和同档次的黑白摄像机相近。

BAYER彩色摄像机原理图
3CCD彩色摄像机,这种摄像机每个像素点对应有R、G、B三个感光元件,采用分光棱镜将入射光线分别折射到三个CCD靶面上,分别进行光电转换得到R、G、B三色的数值(见下图)。这种摄像机得到的图像质量好,没有细节丢失的问题,但由于摄像机结构复杂,所以一般较昂贵。另外由于这种摄像机采用了分光棱镜的方式,光线到达每个CCD靶面的光程是不一样的,所以需要镜头做针对性的设计才能达到比较好的图像效果,所以使用3CCD的摄像机还需要配备专用的镜头。
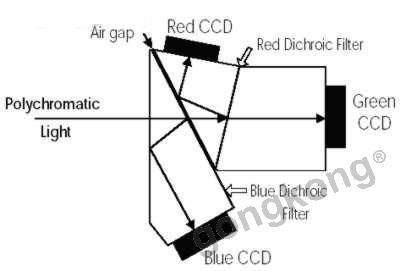
3CCD彩色摄像机原理图
线阵摄像机
线阵摄像机是一种比较特殊的形式,其像元是一维线状排列的,即只有一行像元,每次只能采集一行的图像数据,只有当摄像机与被摄物体在纵向相对运动时才能得到我们平常看到的二维图像。所以在机器视觉系统中一般用于被测物连续运动的场合,尤其适合于运动速度较快、分辨率要求较高的情况。
黑白摄像机,也是最常用的线阵摄像机,每个像素点对应一个像元,采集得到的是灰度图像。
3Line彩色摄像机,该摄像机的具有R、G、B三行像元,分别对红、绿、兰三种波长的光敏感,所以每个像素点都会对应R、G、B三个通道的数值,形成彩色的图像数据。需要注意的是,由于R、G、B三行像元在同一时刻所采集的并非同一位置的信息(见图),在实际应用中需要进行运动校正才能得到所需的彩色图像。一般的摄像机都提供内部进行运动校正处理的功能,但对于对比度非常高的图像边缘还是容易出现色彩失真的现象。
3CCD彩色摄像机,与面阵的3CCD摄像机原理相同,采用分光棱镜将入射光线分别折射到三个CCD靶面上,分别进行光电转换得到R、G、B三色的数值。图像质量好,但需配备专用镜头。




 投诉建议
投诉建议
提交

超越传统直觉,MATLAB/Simulink助力重型机械的智能化转型

新大陆自动识别精彩亮相2024华南国际工业博览会

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会