


KUKA机器人怎么使用工具负荷数据?
工具负荷数据
为了能够最佳地利用KUKA机器人可以供使用的轴加速度最大力矩,可以被采用的工具的负荷数据。
如果编程设定的负荷小于实际值,有可能导致KUKA机器人系统的机械或电气过载。
在进行LIN和CIRC移动时,如果工具负荷大于KUKA机器人负荷曲线中的允许额定负荷,KUKA机器人 系统可能出现机械或电气过载现象,它同编程设定的轨迹速度以及KUKA机器人位置有关。不这样将导致一定的损坏!
按下菜单键”开机运行”,菜单“有效负荷数据”将打开,“测量[“校准”]和子程序“工具”。

从校准程序“XYZ-参考点”,“ABC-2点”,“ABC-全局”和“数字输入”,你可以直接进入工具负荷数据分项。这种情况下,输入工具号是不可能的。
当所属的对话窗口打开时,输入待改变工具的号码。

这儿也能输入总共16种不同的工具的检测数据。

按下软键“工具准备好”,以便编辑选择的工具。数据输入的状态窗口打开。

你可以使用箭头键上或下在输入条之间移动,使用数字键盘上的数字键输入数值,或按下显示屏底部的软键“默认值”,接受标准装载数据,详细解释在系统的基本设置。
默认设置输入条为“1” [机床资料指定装载]。如果输入“〇”,KUKA机器人臂上认为没有工具装载。
预先核对涉及到的KUKA机器人说明书中的负荷曲线,检査工具在不在标准负荷允许的范围之内!
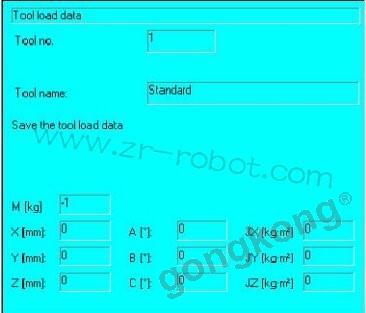
下列菜单在对话窗口的缩写:
M工具的重量
X,Y,Z在KUKA机器人法兰坐标系中,工具重力的中心点到KUKA机器人工作头坐标系原点[位于工作头中心]之间的距离。

A, B, C工具的主要惯性轴[按照Z-Y-X角度]相对于KUKA机器人法兰坐标系的转动关系 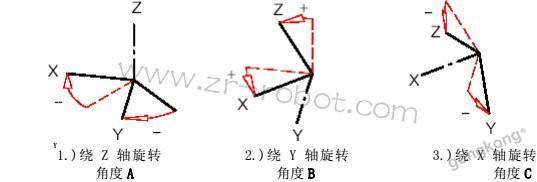
JX,JY,JZ惯性力矩绕工具主要惯性轴
当所有输入完成后,按下软键“数据正确”确认。改动后的工具负荷数据将被显示, 以便检查。
然后使用软键“保存”保存数据,关闭对话窗口。




 投诉建议
投诉建议
提交

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会

中国联通首个量子通信产品“量子密信”亮相!

国家重大装备企业齐聚高交会 中国科技第一展11月深圳举行