


未来的机器人还需要控制器吗?
工业4.0参考架构模型(RAMI 4.0)以一个三维模型展示了制造业涉及的所有关键要素,在这个模型的等级层次维度(右侧水平轴)描述了一个7层的自动化层级,如图1所示,从下到上依次是:产品,现场设备,控制设备,工作站,运营中心,企业,互联世界。
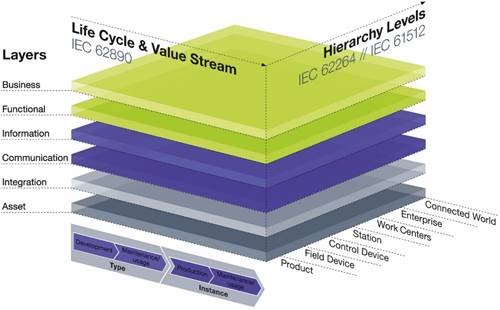
图1.工业 4.0自动化层级
这种功能分类,和IEC 62264(《企业控制系统集成》)和IEC 61512(《批控制》)标准规定的层级一致。在一个实际的工厂环境中,为了更清晰地分析不同层级对于网络通信方面要求的不同,我们把现场设备到工作站之间的层级做了进一步的细分,如图2所示。

图2.车间自动化模型
根据数据大小、循环周期、传输距离、节点数量等特征指标,上图不同层级间网络通信的典型数值如下表所示:

表1.车间自动化通信特征和要求
因为不同层级对于网络通信方面的要求不同,在目前的网络技术条件下,云端通常只是存储设备运行数据,并利用深度学习等人工智能算法,实现系统的在线辨识与建模,然后优化设备的运行效率或者维护设备的运行状态,并不会直接控制驱动器去实现对被控对象的控制。
以云3D打印为例,平台从云端向3D打印机发送G代码来控制打印设备,如图3所示:

图3.目前云3D打印系统架构
这种架构存在的一个主要问题在于,一旦设备定型采购,无法对控制器硬件进行升级(提供扩展的运算性能)。为提高3D打印的效率和精度,某团队开发了一种名为“FBS振动补偿”的软件算法,可以有效地将3D打印速度提高一倍,但是,因为某些3D打印机控制器“的计算能力和内存都很低,不能支持用户的算法。又比如,多台机器人协同运动(RoboTeam)的场景,受限于目前机器人控制器的计算能力,一般只能支持4台机器人的同步运动,无法扩展到更多数量的机器人协同运动。
此外,如果现场的设备控制器需要升级或者更换时,整台设备或者整条生产线都需要停机,进而换上新的设备控制器,这样就会导致生产中止;为满足某些高可靠运行要求的场合,需要建立一个冗余的控制平台(双机热备PLC),这种方案成本太高而且工作也非常繁复。
随着网络技术(5G,Wi-Fi 6)和网络化控制理论(预测控制,数据驱动控制)的不断发展,目前已有所谓的云控制系统(Cloud Control System)的概念,它结合了云计算和网络化控制的优点,其系统拓扑图如图4所示。
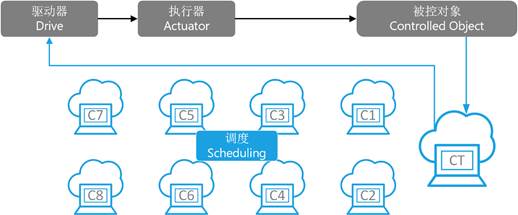
图4.云端控制系统网络拓扑图
在这种架构中,因为云计算是一种具有弹性的服务,使用者无需知道服务提供商的物理位置,只需要有网络连接,就可以按照需要配置所需的虚拟化资源(计算,软件,数据访问和存储),然后在该虚拟化资源上对各种数据(实时数据,历史数据)进行分析和处理,进而生成控制系统的控制信号。
最终,留在现场的终端可以简化成一个单纯或者只需具备有限的计算/存储能力的输入输出设备,上文提到的问题,也可以在这种架构中得到解决,比如即便现场设备控制器无法支持运行“FBS振动补偿算法”,通过扩展云端控制器的运算能力,也可以提高3D打印机的运行效率,如图5所示。
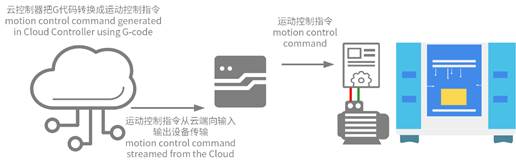
图5.云控制3D打印系统架构
从运动控制的角度而言,机器人和3D打印机的架构有类似之处,因为控制器的计算能力和内存都很低,从而无法支持新算法的问题。在机器人行业同样存在这类问题,云控制系统此提供了一种新的解决思路。
尽管云控制系统具有诸多优势,但是在当前阶段,还是面临许多挑战,比如:信息传输与处理的挑战,如何在大延迟下保证控制质量和闭环系统的稳定性;控制系统安全性的挑战,不仅要抵御物理层的随机干扰和不确定性,更要抵御网络层有策略有目的的攻击等。
所以,这种控制架构不会完全改写业内所熟知的参考架构模型,但在不久的将来,随着网络技术和网络控制的不断发展,云控制系统将对包括机器人在内的各种设备的发展和各种实际应用起到积极推动作用。




 投诉建议
投诉建议
提交

派拓网络被Forrester评为XDR领域领导者

智能工控,存储强基 | 海康威视带来精彩主题演讲

展会|Lubeworks路博流体供料系统精彩亮相AMTS展会

中国联通首个量子通信产品“量子密信”亮相!

国家重大装备企业齐聚高交会 中国科技第一展11月深圳举行