


柔性机器人的柔性驱动技术之气动人工肌肉
今年是2020年,距离牛顿被第一个苹果砸到过去了352年,与爱因斯坦创立狭义相对论相隔了103年,距离“人工智能”这一术语的诞生也隔了62年。
得益于科学家对人类身体的研究,近来,机器文明又取得了一项进步。利用对人类脊髓的研究成果,伊利诺伊大学香槟分校研究人员使用3D打印技术制造出柔软骨架,并以此为基础开发了由肌肉和脊髓组织提供动力的小型步行机器人“spinobots”。
该校细胞与发育生物学教授、研究带头人Martha Gillette说,虽然过去已经有生物机器人可以通过简单的肌肉收缩来前进,但脊髓的增加让它们有了更自然的行走节奏。
Gillette说:“这些都是朝着交互式生物设备方向前进的开始,同时这些生物设备也可用于神经计算和恢复医学。”。研究以Emergence of functional neuromuscular junctions in an engineered, multicellular spinal cord-muscle bioactuator(一种工程化多细胞脊髓肌肉生物激励器中功能性神经肌肉连接的发现)为题,发表在了《APL生物工程》杂志上。
他们假设,一个完整的大鼠腰脊髓段可以与工程化的3D肌肉组织形成功能性神经肌肉连接,模拟周围神经系统的部分发育。且最终的试验数据表明,大鼠脊髓能够在离体之后与工程肌肉组织形成功能性神经肌肉连接。下一步,研究人员计划进一步完善自旋机器人的动作,使它们的步态更自然。研究人员希望这种小范围的脊髓整合是建立外周神经系统体外模型的第一步,目前这在活体病人或动物模型中是很难研究的。
这不是第一次人类取得突破性的机器人进展,确实最近的一次人类在软体机器人的突破。
1962年,美国Unimation公司的第一台机器人Unimate在通用汽车(GM)公司投入使用,成为第一代机器人诞生的标志。此后的半个世纪里,伴随着计算机技术、智能控制技术、通信技术以及先进制造技术等技术的发展,机器人技术得到了飞速的发展。
而软体机器人则是科学家为了使得机器人更像人的重点努力方向。随着机器人应用场景的多元化,逐渐提出"人机友好"的设计要求,传统电机减速器等刚性驱动技术虽可提供较大输出力,容易设计具有高带宽、高性能的力驱动器,但其顺应性差,在"人机交互"时安全性不高。关注公众号三〇智工,工科领域技能人才优质岗位一键推荐、智能制造企业人才招聘解决方案。但进行脊髓等机器人执行器设计主要考虑的是驱动问题,柔性驱动方式凭借其适应性强、重量轻、良好的人机交融等优势,在医疗康复和服务领域有着广泛的应用。且随着生物力学的发展,人体骨骼-肌肉结构的优越性愈发引起重视,柔性驱动技术在医疗康复和服务领域有着愈发广泛的应用。
对于软体机器人来说,由于具备高安全性以及能与人类、恶劣环境进行自适应性交互,软体机器人拥有了传统刚性传机器人难以具备的功能。比如,软体机器人在执行抓取作业时因其自身的柔软性而能改变自身形态,对一些易碎品和不规则物体进行抓取时,采取包裹形式抓取,不会损坏物体。
而运动,往往需要肌肉发力,气动人工肌肉,是人造肌肉(artificial muscle)的一种,是科学家认为机器人动力的来源。人造肌肉即电活性聚合物,是一种新型智能高分子材料,是根据生物学原理由缬氨酸、脯氨酸和甘氨酸这 3 种氨基酸按一定顺序排列构成,可在外加电场下通过内部结构的改变而伸缩、弯曲、束紧或膨胀,非常接近生物的肌肉纤维。
气动人工肌肉,从字面意思上理解就是,由外部的压缩空气驱动进行推拉动作的人造肌肉,具有柔顺性、轻量性、绿色性等优势。这一材料重量轻(最小仅为 10g),却能提供很大的力量,用“四两拨千斤”来形容它再合适不过了。
气动人工肌肉往往用限制变形的支撑材料作为骨架,骨架内部是可膨胀的气囊(或类气囊)结构,通过气囊的膨胀和收缩来执行各种柔顺的动作,这种结构继承了气动元件的基本优点,同时还具备了结构简单、高柔性和良好的仿生特征等其他机械执行机构所无法比拟的特点,是应用最为广泛的柔性驱动方式之一。
目前,按照人工气动肌肉的结构大致可分为类编织结构、纤维类增强结构、弹性气室结构、增强弹性结构,当然近来也有一些新的肌肉结构。
类编织结构型气动肌肉
20世纪50年代,美国原子物理学家Joseph L. McKibben设计出最早的气动人工肌肉驱动器,被称为McKibben型PMA(Pneumatic Muscle Actuator),如图所示。一般而言,气动人工肌肉由外部提供的压缩空气驱动,作推拉动作,其过程就像人体的肌肉运动。它可以提供很大的力量,而重量却比较小,最小的气动人工肌肉重量只有10g。

图:McKibben型PMA (来源[2])
而这个设计当时其结构为:内层为橡胶管,橡胶管外面用纤维编织网套住,两端用金属挟箍密封。关注公众号三〇智工,工科领域技能人才优质岗位一键推荐、智能制造企业人才招聘解决方案。当向橡胶管内腔充入压缩气体时,随着内腔气体压力上升,橡胶管沿径向膨胀,膨胀的橡胶管撑起外层纤维编织网,使得径向膨胀力变为轴向收缩力,其运动形式酷似生物肌肉,这种类编制结构是人工气动肌肉应用最多的形式。
此前,东京工业大学Giacometti机械臂便应用了这种技术,主要由薄膜气球、McKibben型气动肌肉、充气导管以及提供气源的基座组成。Giacometti 充气臂利用人造肌肉产生的扭矩提供关节处的弯曲力,常规肌腱驱动的机械臂需要充气臂杆在非关节处提供高强度的抗弯力,以抵抗肌腱力避免发生形变,或者设计臂杆侧壁结构抵抗肌腱反作用力。

图:Giacometti机械臂(来源[3])
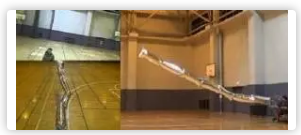
图:Giacometti机械臂(来源[3])
纤维类增强结构型气动肌肉
在此基础上,为了节省成本,又一种新的气动结构被发现了,这是由哈佛大学 Biodesign Lab实验室开发了一种新结构的气动肌肉。该气动肌肉一侧为固定材料,拉伸性能较差,但有良好的弯曲性能;另一侧为可拉伸纤维,直接影响肌肉的弯曲性能。当可拉伸纤维伸长时,另一侧固定材料不发生轴向变化,限制肌肉在该侧的长度,但纤维面轴向伸长,导致肌肉回向固定材料侧发生弯曲运动,反之肌肉则会向纤维侧发生弯曲运动。

图:纤维类增强结构(来源[4])
弹性气室结构型气动肌肉
而为了提供更强大的动力,哈佛大学Wyss Institute研究团队利用气压变化研制了一种新式气动肌肉[5]。这种形式的气动肌肉主要组成部分为可抽气的密封气室。当密封气室内气压与外界大气压相同,相互之间不产生力时,肌肉处于放松状态;当抽出气室中的空气,外界大气压会对气室产生作用力,使肌肉处于弯曲状态。这种形式的气动肌肉弯曲能力直接与大气压力有关,导致其负载性能较弱,输出力有限。
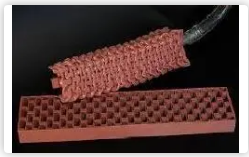
图:弹性气室结构约束(来源[5])
增强弹性结构型气动肌肉
美国哈佛大学利用爆燃原理研制了一款增强弹性结构气动肌肉,如图5所示。该种肌肉主要部分为增强弹性材料制成的气室。与弹性气室结构不同的是,在增强材料结构气室中进行甲烷的燃烧,利用甲烷爆燃产生冲击力实现肌肉的跳跃运动。该种结构无需充气设备,能够提供较大作用力,但由于是爆燃产生的冲击力,该种肌肉难以实现精确控制。

图:增强弹性结构约束(来源哈佛大学Bi)
2000 年 FESTO 公司推出了仿生气动肌腱系列化产品,并提供了相应的应用解决方案,标志着气动人工肌肉进入了一个崭新的时代,它已正式成为了一种标准的气动执行元件。气动人工肌肉良好的仿生特征决定了其在机器人领域广阔的应用前景,其发展与机器人技术息息相关,两者结合可使机器人完成更多的类人操作。
更多
2019 年 7 月,MIT 科研团队还在 Science 发表论文,介绍了他们利用 2 种热膨胀系数不同的聚合物材料高密度聚乙烯和环烯烃共聚物弹性体制成的新型人造肌肉,这种人造肌肉一经加热,便可自由伸缩,提起比其自身重 650 倍的物体。这一研究也登上了当期 Science 封面。
这种纤维可以用作机器人,义肢,其他机械和生物医学应用的人造肌肉,也可用于微小的生物医学设备,例如通过进入动脉然后被激活的医疗机器人。极轻的重量再加上对刺激很好的反馈里都让它从众多材料中脱颖而出,同时这种纤维还可以被捆绑在一起使用,就像肌肉细胞在人体内的情况一样,如此一来载荷效果更佳。
近日,国际著名期刊 Soft Robotics 刊登了哈尔滨工业大学冷劲松教授团队与美国马里兰大学 Norman M. Wereley 教授团队的共同研究成果,题为 Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk(受象鼻启发的新型弯曲螺旋可伸展/收缩气动人工肌肉)。上述研究团队受到象鼻的启发,基于气动人工肌肉(Pneumatic artificial muscles,PAMs),也研制出了一种新型柔性软体机器人。
实际上,人造肌肉材料已成为当今研究的前沿和热门,这与人们对柔性机器人领域越来越多的关注密不可分。柔性机器人可具备的特性包括材料的柔软性、优良的环境适应性、超强的安全性,以及良好的人机互动性。正如香港科技大学机器人研究院院长、机械及航空航天工程学系教授王煜在 2018 年世界机器人大会上所说:
不过,想要完美地同时兼具上述几种特性,还有很多技术上的难题,目前研究人员们也正在寻求一个突破口,比如中国科学院理化技术研究所研究员、清华大学教授刘静团队考虑了室温液态金属在柔性机器人领域的应用;MIT 研究人员曾用 3D 打印、液压驱动的方式驱动机器人运动。
虽然现阶段柔性机器人领域仍比较“概念化”,但其应用前景广泛,未来必将会带来新的变革。




 投诉建议
投诉建议
提交

电机的五种启动方式原理对比
智能仓储体系打造的4大关键点
工业机器人变频器的电路分析及维修方式
工业机器人变频器的电路分析及维修方式
机器视觉相机标定的目的、原理及步骤