


图尔克成功案例 | 使用自主机器人选择性收获芦笋
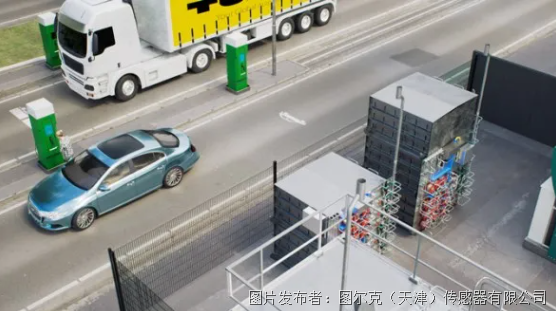
荷兰初创企业AvL Motion推出了一款可完全自主式选择性收获白芦笋的机器。在寻找用于控制高度的超声波传感器过程中,该公司发现了图尔克支持IO-Link技术的RU40U。通过后续进一步合作,AvL Motion在其车辆中集成了更多传感器技术,包括微型电感式接近开关、精密编码器以及LE550激光传感器和坚固的Li500-Q25直线位移传感器。AvL还使用TN-Q14 RFID读写头来识别收获模块,并使用TBEN-S2-4IOL紧凑型I/O模块将IO-Link信号传输至PLC。
TBEN-S2-4IOL多协议设备用作传感器与PLC之间的接口AvL Compact S1560自动将芦笋从土壤拔出机器上共布置有6到12个收获模块AvL创始人Arno van Lankveld使用图尔克的IO-Link超声波传感器RU40U凭借坚固的设计,Li500-Q25也可安装在外部的前桥上方缓存区中的BI3-M08K微型传感器检测收获盒子的数量当盒子通过NI10U-M12时,PLC启动针对收获操作的计时器图尔克编码器报告当前可用的收获模块所处的缓存位置在驾驶员平台上,工人将芦笋打包至箱子中,并控制收获机TBEN-S2-4IOL多协议设备用作传感器与PLC之间的接口AvL Compact S1560自动将芦笋从土壤拔出

AvL Compact S1560自动将芦笋从土壤拔出

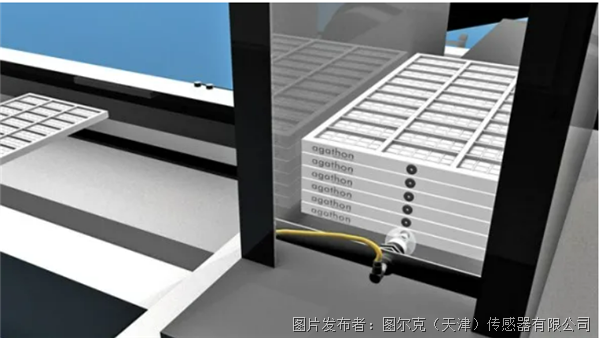
机器上共布置有6到12个收获模块

AvL创始人Arno van Lankveld使用图尔克的IO-Link超声波传感器RU40U

凭借坚固的设计,Li500-Q25也可安装在外部的前桥上方

缓存区中的BI3-M08K微型传感器检测收获盒子的数量

当盒子通过NI10U-M12时,PLC启动针对收获操作的计时器

图尔克编码器报告当前可用的收获模块所处的缓存位置

在驾驶员平台上,工人将芦笋打包至箱子中,并控制收获机

TBEN-S2-4IOL多协议设备用作传感器与PLC之间的接口
使用带IO-Link接口的超声波传感器进行高度控制
AvL Motion使用2个带IO-Link接口的RU40U超声波传感器来测量芦笋床与机器的气动控制型内部框架间的距离。尽管下层土壤较脏或被雨水侵蚀,传感器仍能稳定测量高度(高度可以在HMI上设置)。“图尔克出色的产品质量和快速发货能力让我们印象深刻。我们将继续与其就其他组件进行合作。”AvL CEO Arno van Lankveld表示。
光电技术取代依赖经验的肉眼识别
AvL Compact S1560的收获过程是动态变化的。一旦机器完成定位并开始运行,就会扫描土壤的表面。芦笋尖的精确位置通过使用激光传感器和额外的光电过程,由主控制器检测。在收获过程中,数量不一的收获模块围绕机器人内部的圆形轨道移动。目前,这包括12个约25厘米高的盒子。它们按照机器人的速度进行调节,并控制插入、收割和夹取的整个过程。
在目标与收获模块之间进行微调
控制器不仅需要所选芦笋的坐标来微调收获过程,还需关于模块位置和移动的连续信息流。首先它会查询当前缓存区中有多少个盒子,例如有多少个处于停留位置等,然后当前检测到芦笋的盒子会被回路检测到。对此,AvL使用小型的BI3-M08K电感式传感器。对收获模块的精确识别通过RFID技术实现 – 使用的是TN-Q14 HF读写头,该读写头可以读取每个盒子上的独特编码。此外,位置检测通过旋转编码器实现。
电感式传感器触发计时器
一旦收获机启动回路,就会通过NI10U-M12 uprox接近开关,并启动PLC中针对收获过程的计时器的运行。由于芦笋尖不会整齐生长,收获模块除了沿圆形轨道移动外,还可左右移动。这由压缩空气驱动,因此会延迟零点几秒。然而,为了确保盒子的正确对齐,PLC会获取模块初始位置和目标位置间的距离信息(使用图尔克的LE550激光传感器测量)。
利用操纵杆转向
操作人员使用外部控制模块来控制收获机的速度和静液转向。2个图尔克编码器负责测量轮子转数;AvL使用电感式直线位移传感器来测量轮子位置。为此,LI500-Q25传感器的定位元件与转向油缸的活塞相连。这样,主控制器便可使用唯一的数值计算2个轮子的角度,然后操作人员可以轻松使用操纵杆转向。与竞争对手的产品不同,农民无需将AvL Compact S1560固定至拖拉机。




 投诉建议
投诉建议
提交

让理想照进现实——随时保持关注机器和设备的状态

厂内物流智慧的硬核:智能感知
围观 | 用于加氢站防爆区的分布式I/O解决方案

重磅 | 研讨会预告| 图尔克数字化赋能 助力3C电子精益生产再升级
甜蜜的自动化| 巧克力生产中的RFID智能识别方案