


风丘科技为您提供激光雷达在ADAS测试中的应用与方案

在科技高速发展的今天,汽车智能化已是必然的趋势,自动驾驶汽车的研究也在世界范围内进行得如火如荼。而在ADAS测试与开发中,激光雷达以其高性能和高精度占据着非常重要的地位,它是ADAS测试与开发中不可缺少的组成。
一 激光雷达介绍
| 激光雷达原理
1. 全称
激光雷达(英文:Lidar),英文全称为Laser Detecting and Ranging,即激光探测和测距。
2. 探测原理
激光发射器发射激光脉冲,计时器记录发射时间;脉冲经物体反射后由接收器接受,计时器记录接受时间,距离d= (Δt*c) /2。

之后再通过水平旋转扫描来测角度,并根据角度和距离这两个参数来建立二维的极坐标系,然后通过获取不同的俯仰角度信号来获得三维中的高度信息,由此不仅可探测到周围环境的空间三维位置,还可根据探测到的信息来进行三维建模。

高频激光可以在一秒内获取大量(约150万个)的位置点信息(称为点云)。除了可以获取位置信息外,激光信号的反射率还可以区分目标物质的不同材质。
| 主流激光雷达品牌
1. Velodyne
特点:精度高;范围广,可360°探测;抗干扰能力强。具有优秀的性能,但价格昂贵。
以在全球位居前列的激光雷达制造厂商Velodyne为例:

2. Ibeo
特点:可识别障碍物类型,如行人、汽车或大卡车等。可输出障碍物俯视图轮廓、目标物体位置和运动信息参数。


| 激光雷达数据
在实际的无人驾驶系统中,每一帧的数据都会有时间戳,需根据时间戳进行后续和时间有关的计算。因此,N线激光雷达的点云数据结构如下图所示。

二 激光雷达在ADAS测试中的应用与作用
激光雷达在无人驾驶运用中拥有几个核心作用——周围环境3D建模、高精度定位以及障碍物检测与分类识别。
| 障碍物的检测和分类
激光雷达在扫描的过程中,首先识别障碍物,明确障碍物在空间中的位置,再根据存在的障碍物来进行分类。例如,我们将像车、人这些障碍物分割成为独立的个体,通过分割出来的独立个体再去匹配,从而进行障碍物的分类和物体的跟踪。而跟踪的过程是先分割点云,再通过点云做关联目标,如此一来,我们便能判断出上一桢和下一桢是否属于同一个物体,以便再进行目标跟踪,然后输出目标跟踪信息。

| 高精度电子地图制图与定位
利用多线激光雷达的点云信息与地图采集车载组合惯导的信息来进行高精度地图的制作。自动驾驶汽车通过激光点云信息与高精度地图两者相匹配来实现高精度定位。

三 激光雷达数据采集、存储与分析
| 激光雷达数据采集
在ADAS测试中,一辆车上一般需装载多个激光雷达、多个毫米波雷达和多个摄像头,而数据将通过以太网或CAN FD等数据类型来进行输出。风丘科技推出的ADAS测试方案可同时对多路雷达、视频、车辆总线和数采等多种数据进行采集、在线显示与存储。
1. 硬件:高性价比工控机

• 配置:inter i7-8700T CPU、32GB RAM、Win10操作系统
• 接口:3 Video、6 USB
3*1GB ETH、2 RS-232
8 I/O、Audio、1 CAN
可扩展的Pcle接口(CAN、LIN)
• 工作温度:-40~70℃
• 2个可热插拔的移动硬盘卡槽
• 单个硬盘可支持1TB存储
• 支持WiFi、4G、LTE等无线通讯
• 9~48V车载供电
2. 软件:Q-Vision

• 支持CAN/LIN/CAN FD/ETH等多种信号采集
• 支持雷达点云图、雷达俯视图、地图轨迹、视频、CAN总线和y-t等多种视图显示
• 支持Kvaser、Vector、Softing和NI等多种CAN硬件
• 支持Velodyne、Ibeo等知名雷达传感器
......
请点击此处,查看剩余25%精彩内容!
| 往期回顾
▶ IPETRONIK数据采集设备携手Softing Q-Vision软件致力于ADAS测试方案

![]()




 投诉建议
投诉建议
提交

带有高压充电桩的气候声学室
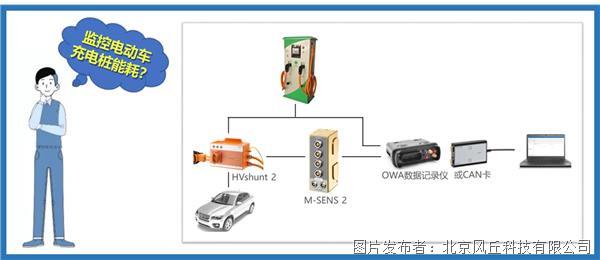
如何监控电动车充电桩能耗?

车队试验的远程实时显示方案,你了解多少

汽车娱乐系统解决方案

Capture Modules-车载网络报文捕获模块