


库卡机器人编程TRIGGER触发指令的应用分析
KUKA机器人TRIGGER(轨迹切换指令)可以触发一个定义的指令,能够与机器人运动同时执行,与运动语句的起点或目标点有关。
1、TRIGGER WHEN DISTANCE 语句
该指令与运动语句的起点或目标点有关。
语法:TRIGGER WHEN DISTANCE=位置 DELAY=时间 DO 指令 <PRIO=优先级>
位置:规定在哪个点触发指令。可能的值有:
0:指令在动作语句的起点处被触发。
1:指令在目标点处被触发。如果目标点是轨迹逼近形式,则指令将在该轨迹逼近弧形的中点处被触发。
时间:以此可确定所选位置的延迟时间。
可应用正值和负值,以毫秒 (ms) 为单位表示,可以使用 10,000,000 ms 及以下的时间值。
可执行的指令有:给一个变量赋值(不能对运行时间变量赋值)、OUT 指令、PULSE 指令、调出一个子程序等。调用子程序时,必须给明优先级(有优先级 1、2、4 - 39 以及 81 - 128 可供选择。优先级 40 - 80 是系统预留的,自动分配的)。
2、TRIGGER WHEN PATH 语句
指令 PATH 与运动语句的目标点有关。必须通过轨迹运动 (LIN 或 CIRC类型) 驶至目标点。该运动不允许是PTP类型。
语法:TRIGGER WHEN PATH= 行程段 DELAY= 时间 DO 指令 <PRIO= 优先级 >
行程段:确定相对目标点的位移。行程段以毫米 (mm) 为单位表示,可给出 +/- 10,000,000 mm 范围内的位移值
正值:向运动结束方向推送该指令
负值:向运动开始方向推送该指令
时间: 在此通过 PATH 值确定至选定位置的位移时间。可为正值和负值,以毫秒 (ms) 为单位表示,可以使用 10,000,000 ms 及以下的时间值。
可执行的指令有:给一个变量赋值(不能对运行时间变量赋值)、OUT 指令、PULSE 指令、调出一个子程序等。调用子程序时,必须给明优先级(有优先级 1、2、4 - 39 以及 81 - 128 可供选择。优先级 40 - 80 是系统预留的,自动分配的)。
例2:向运动结束方向切换
KUKA机器人TRIGGER指令在涂胶、激光清洗等应用较为常见,需要对某个指令提前或滞后触发来满足生产工艺要求。




 投诉建议
投诉建议
提交

三千余家国际基金投资机构云集高交会,携万亿巨资寻找优秀种子企业

从IFA 2024看海尔在欧洲如何成为主流高端品牌

尼得科集团4家机床企业参展IMTS 2024

智能头号玩家,高创PH3驱动精益生产升级
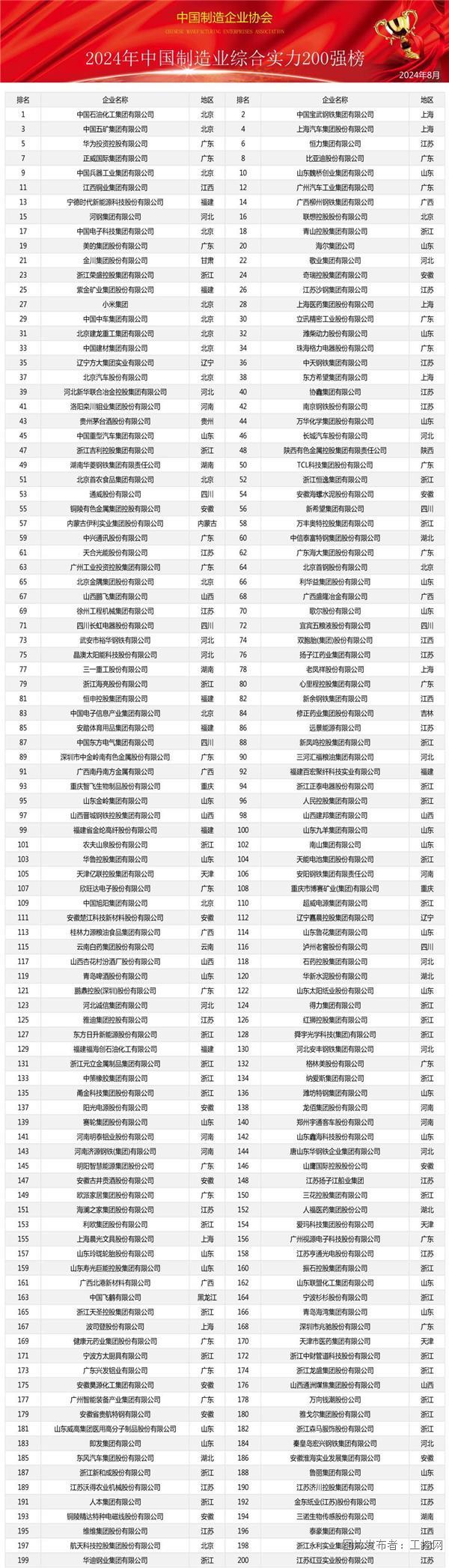
2024中国制造业综合实力200强暨中国装备制造业百强榜单震撼发布