CANopen型PLC与泰科伺服驱动器之间通信与测试
2014/8/4 9:41:29
0 人气:162
本文章以泰科智能的IDM640-8EIA系列产品为例子,介绍CANopen型PLC与伺服驱动器之间的通信及其设置。
| 说明: | 该文档适用产品:IDM640-8EIA-CANopen |
|
|
|
| 问题: | 对于泰科智能驱动器CANopen应用的新用户来说,如何开始CANopen连接是一个较为复 |
|
| 杂的工作,您需要配置通讯参数,测试通讯情况等。 |
|
|
|
| 解决方案: | ◆ 驱动器:泰科智能伺服驱动器IDM640-8EIA-CANopen |
|
| ◆ PLC:施耐德TM258LF42DT4L (或其他支持CANopen功能的PLC) |
|
| ◆ 软件环境:泰科智能软件EasyMotion Studio,施耐德PLC软件Somachine |
|
|
|
| 描述: | 该文档描述了: |
|
| • 如何进行基本的硬件连接 |
|
| • 驱动器的CANopen基本配置 |
|
| • PLC的CANopen基本配置 |
|
| • CANopen快速测试及案例 |
| 连接: | |
|
| PLC与驱动器的通讯连接: |

图1 CANOpen接线说明
|
| 多台驱动器的连接方式: |
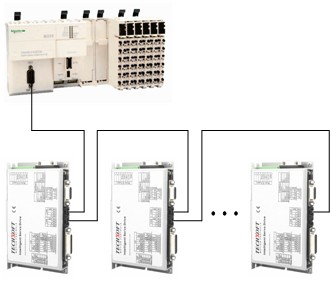
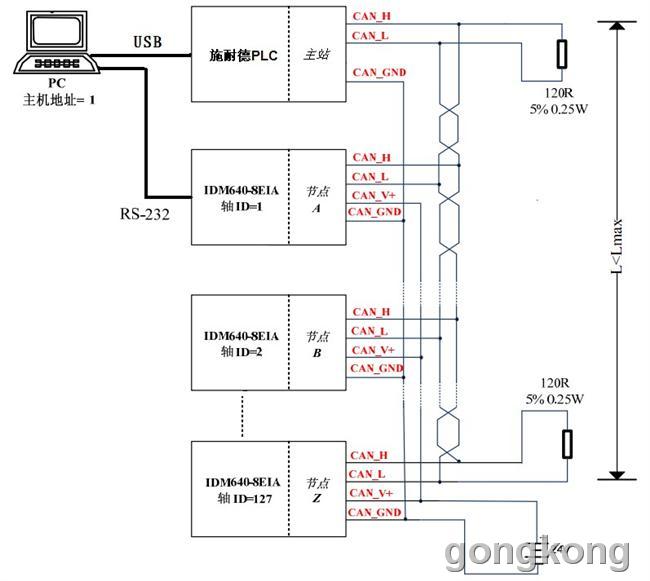
图2 多台驱动器连接
注:第一个节点和最后一个节点应在CAN_H和CAN_L之间并联一个120欧姆的电阻。
| 驱动器设置: |
|
1. 建立通讯
打开EasySetUp软件,驱动器上电后建立通讯,创建工程文件并配置好驱动器/电机参数。具体操作详见IDM640-8EIA技术参考手册,此处不再累述。
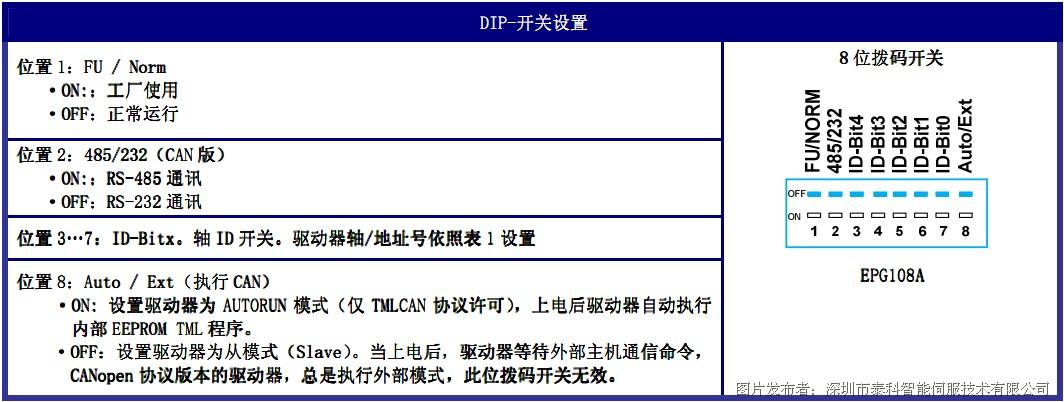
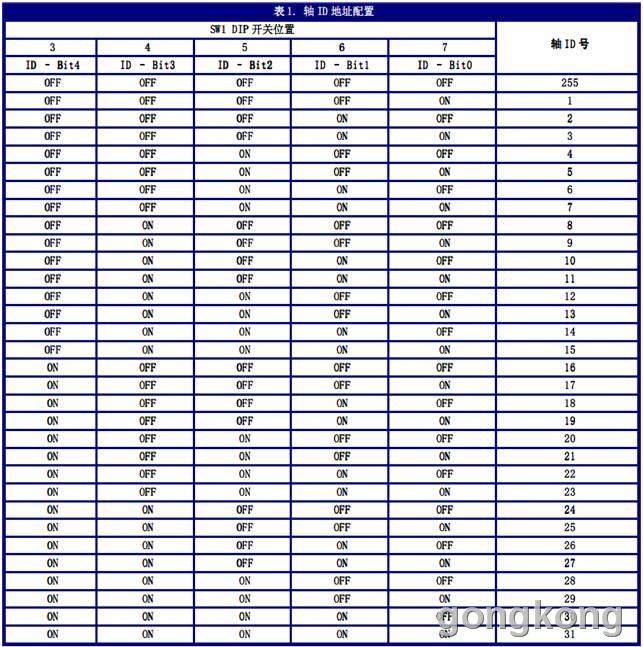
2. 改变驱动器轴ID号,泰科智能驱动器轴ID号可以用两种方法设置:
•· 硬件方式 (H/W)-轴ID号范围为1到31/255,可由DIP开关改变状态实现,带电状态下更改需断电重启。
•· 软件方式-可选择1-255之间任何值,然后保存在设置表中
注:如果驱动器轴ID号之前通过软件设定过,而且现在不知道这个值,您可以在Communication | Setup对话框中的“Axis ID of drive/motor connected to PC” 选择Autodetected来找到它。这个方法仅在驱动器通过RS232直接与PC连接时有效。如果这个驱动器只是CANbus网络中的某个节点且PC与其他驱动器串行连接,用菜单命令Communication | Scan Network也能找到这个驱动器的轴ID号。
DIP开关设定:
软件设定:
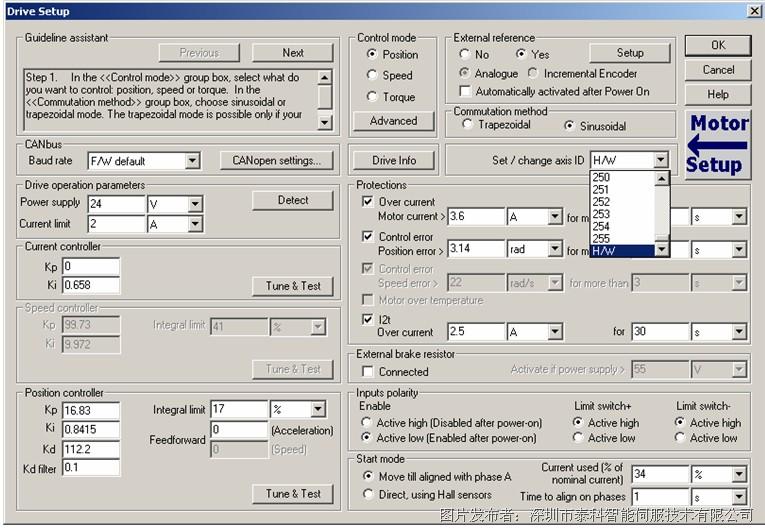
图3:通过软件更改轴ID号
3. 设置CANbus波特率
泰科智能驱动器在CAN通信时能工作在以下波特率:125kHz, 250kHz, 500KHz, 800 KHz,1MHz。
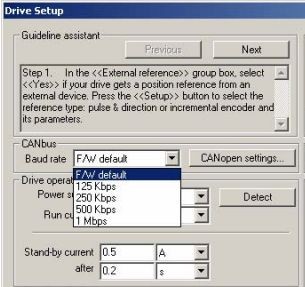
图4 驱动器CANOpen通讯波特率设置
| PLC设置: |
|
1. 建立PLC项目,并导入EDS文件。
点击工具菜单下的设备库…选项;
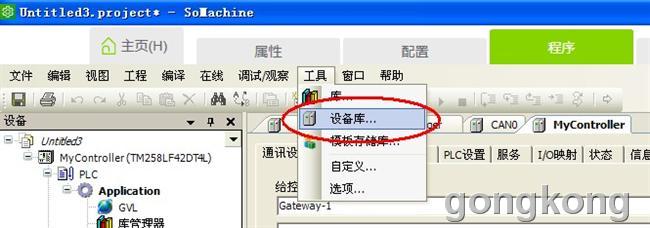
图5
点击安装…选项;

图6
选择EDS文件,并点击打开,导入EDS文件完成。

图7
2. 添加从站。
选择CAN0,并选择添加设备…选项;
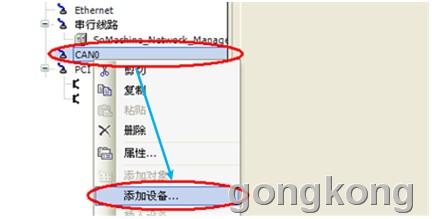
图8
勾选图中设备项目,并点击添加设备选项;
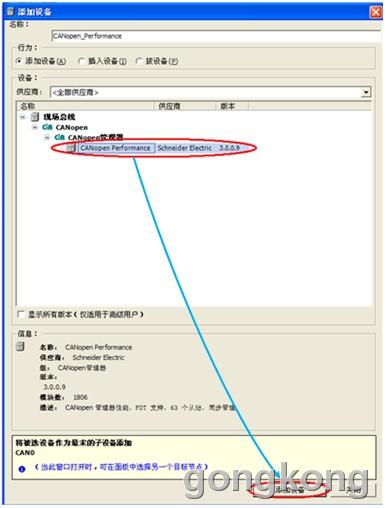
图9
勾选图中项目,并在右键选项里点击添加设备…选项;
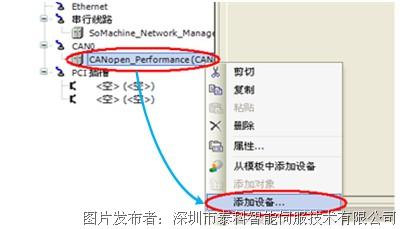
图10
选择供应商Technosoft,勾选对应设备(IDM/ISCM),点击添加设备选项;
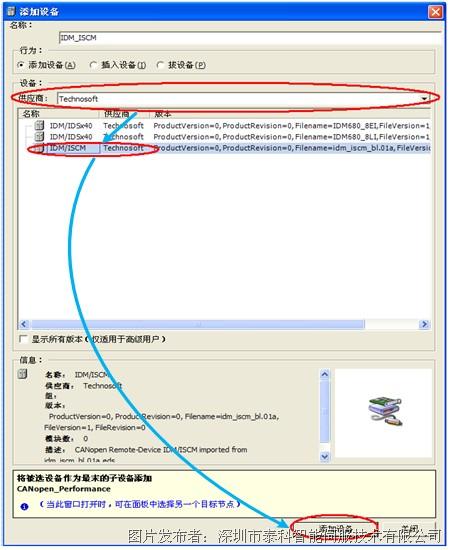
图11
3. 设定主站参数。
设定主站CAN通讯波特率,应与从站一致。

图12
4. 设定从站参数。
写入节点ID,应与驱动器轴ID号对应;勾选使能专家设置;

图13
5. 添加网关。
勾选控制器,在展开的通讯设置界面里点击添加网关…选项,并确认。
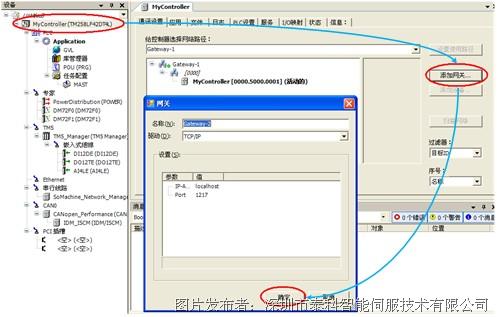
图14
选择Gateway-1,并勾选主站MyController,点击设置使用路径,并按“Alt+F”。

图15
6. 登陆程序。
点击图中工具栏中的登陆图标;
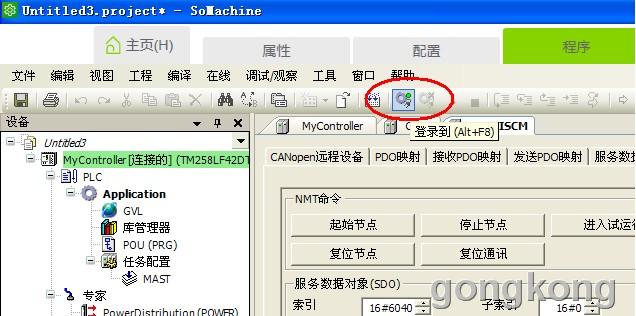
图16
若连接成功,CAN子菜单栏前方会出现如图所示绿色标志,否则断电检查接线及重复以上操作。
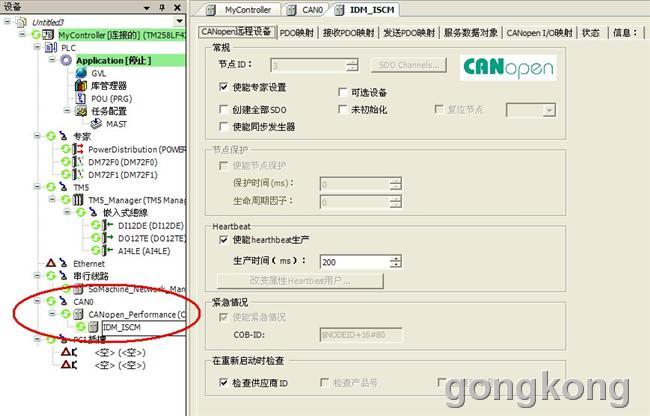
图17
| 测试: |
|
1. 基本测试。
勾选从站,点击状态选项,即可读写从站参数。
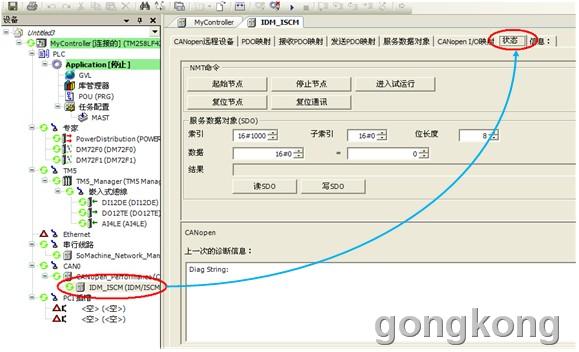
图18
2. 应用举例。
以600rpm的目标速度执行速度控制。
1) 启动远程节点。发送一个NMT信息启动节点id6。
发送以下信息:
| COB-ID | 0 |
| 数据 | 0106 |
2) 改变为Readyto switch on状态。通过修改控制字映射的PDO,将节点状态由Switchon disabled改变为Ready to switch on。
发送以下信息:
| COB-ID | 206 |
| 数据 | 0600 |
3) 改变为Switchon状态。 通过修改控制字映射的PDO,将节点状态由Readyto switch on改变为Switch on。
发送以下信息:
| COB-ID | 206 |
| 数据 | 0700 |
4) 改变为Enableoperation状态。通过修改控制字映射的PDO,将节点状态由Switchon改变为Operationenable。
发送以下信息:
| COB-ID | 206 |
| 数据 | 0F00 |
4. 选择控制模式。选择速度控制模式。
发送以下信息(SDO访问对象6060h,8位数值3h):
| COB-ID | 606 |
| 数据 | 2F 60 60 00 03 00 00 00 |
5. 设置目标速度。设置目标速度为600rpm。以500增量编码器为例,当位置/速度控制的采样周期为1ms时,对象60FFh应设置为140000h。
发送以下信息(SDO访问对象60FFh,32位值00 140000h):
| COB-ID | 606 |
| 数据 | 23 FF 60 00 00 00 14 00 |
7. 检查电机实际速度。电机应该以600rpm的速度转动。

手机扫描二维码分享本页

工控资讯APP 安卓版下载

工控资讯APP IOS版下载
| 评价: | 一般 | ||