


KW-Software 运动控制、机器人解决方案
KW-Software SoftMotion
运动控制、机器人 解决方案

KW-Software提供的Motion Control解决方案是新一代基于实时以太网总线型的运动控制系统解决方案,可用于普通单轴/多轴运动控制以及工业机器人等复杂运动控制。
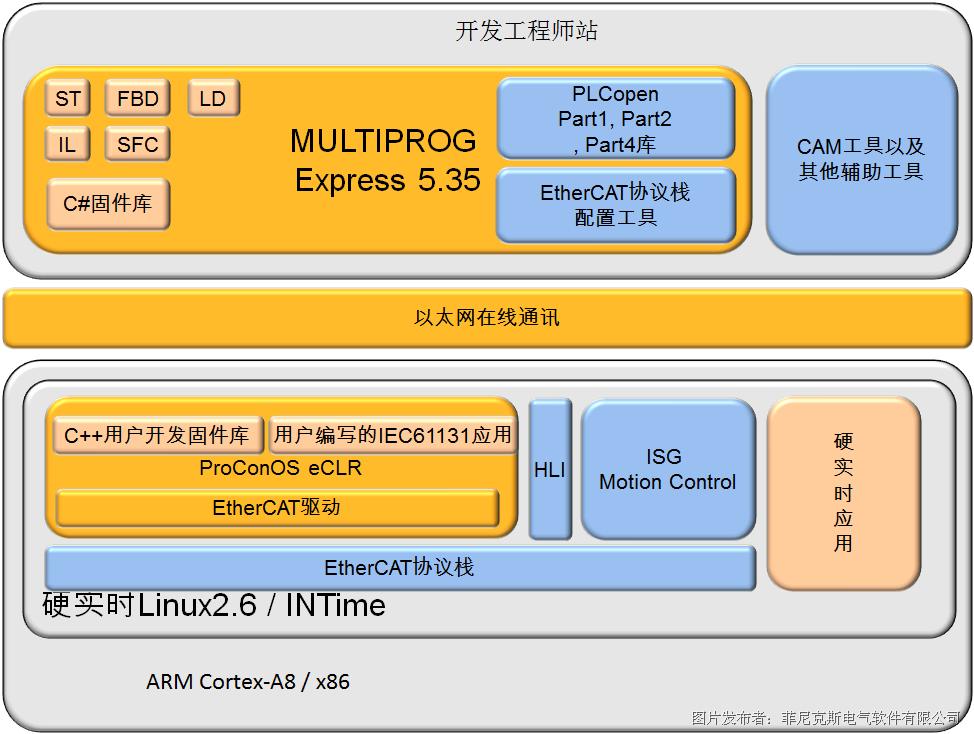
该Motion Control解决方案集成了全球领先的ISG运动控制内核,用于运动控制相关算法的实现。同时结合KW-Software的ProConOS� embedded CLR可编程控制器内核,使用符合IEC61131标准的编程工具MULTIPROG进行运动控制行业应用编程。在总线方面,采用高速实时以太网总线EtherCAT作为运动控制通讯总线。在系统平台方面,采用高性能实时操作系统INtime操作系统或者实时Linux2.6(OSADL RT补丁)操作系统,使实时性得到极大地保证。
方案描述
基于ARM Cortex-A8 Linux 2.6(OSADL Patch)基础性运动控制解决方案:
� 适用于中端运动控制平台解决方案。
� 结合OSADL实时补丁的嵌入式实时Linux平台,实时响应时间在1ms内。
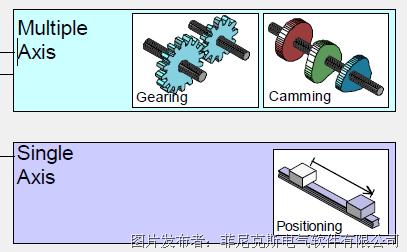
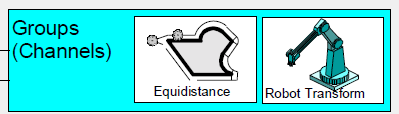
� 单轴、多轴(电子齿轮、电子凸轮)基本运动控制功能,采用PLCopen TC-2 Part1和Part2标准算法库实现。
� 采用EtherCAT工业以太网总线连接伺服电机驱动器,且EtherCAT配置工具已集成到编程工具。
� 可以基于ProConOS eCLR内核使用C 开发自定义功能算法模块或者其他应用。
基于x86 INtime的高端运动控制解决方案:
� 面对工业机器人应用的高端运动控制平台。
� 采用INtime高性能操作系统,实时响应可达到100us。
� 支持多核架构,可充分发挥多核效能与优势。
� 单轴、多轴(电子齿轮、电子凸轮)基本运动控制功能,采用PLCopen TC-2 Part1和Part2标准算法库实现。
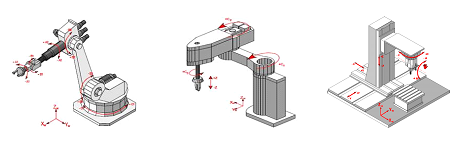
� 多轴联动高级运动控制功能,采用PLCopen TC-2 Part4标准算法库实现(如 可支持6轴联动)。
� 开放运动控制内核编程接口,用于高端机器人运动控制。
� 采用EtherCAT工业以太网总线连接伺服驱动器,且EtherCAT配置工具已集成到编程工具。
� 可以基于ProConOS eCLR内核使用C 开发自定义功能算法模块或者其他应用。
SoftMotion组件
基于MULTIPROG的SoftMotion应用编程库
� 符合PLCopen TC2 Part1与Part2部分的算法库模块。
� 符合PLCopen TC2 Part4部分的算法库。
高端工业机器人Kinematics模板
� 现成支持各种主流工业机器人模板,加速您开发工业机器人。
系统架构




 投诉建议
投诉建议
提交

PHIIDF2021顶配发布,有些热爱,值得去奔赴!
开放式工业控制器软件方案技术研讨会

菲尼克斯电气标识和安装材料业务再添新助力

菲尼克斯电气 IEC61131 · PROFINET 技术研讨会9月开始啦!
基于PLCopen标准的工业机器人控制软件技术研讨会