


电子凸轮在运动控制中的实际应用
电子凸轮可完成与机械式凸轮相似的功能,而没有机械式凸轮设计难度大、加工成本高、运动高副易磨损等缺点,在许多场合是机械式凸轮的理想替代品。电子凸轮功能也可用来进行不规则曲线的逼近。
正运动运动控制器既有标准凸轮功能(CAM与CAMBOX),也有MOVELINK,MOVESLINK, MOVELINK_MODIFY, FLEXLINK等简化的凸轮运动指令配合使用,还可实现追剪、飞剪、旋切等应用场景所需的动作流程。
下面以MOVESLINK为例说明运动控制的用法:MOVESLINK指令用于自定义的凸轮运动,该运动自动规划中间曲线,不用计算凸轮表。被连接轴为参考轴,连接轴为跟随轴。在加速和减速阶段为了与速度匹配,下一条MOVESLINK的start sp必须与当前MOVESLINK的end sp相同。
MOVESLINK(distance, link dist, start sp, end sp, link axis[, link options] [, linkpos][, link offpos])
linkoptions, link start,link offpos可选参数不填时, 逗号不能省掉,控制器根据参数的位置来判断是什么参数。
distance:从连接开始到结束,跟随轴移动的距离,采用units单位。
link dist:参考轴在连接的整个过程中移动的绝对距离,采用units单位。
start sp,endsp: :启动时与结束时的跟随轴和参考轴的速度比例,units/units单位,负数表示跟随轴负向运动。
注:当startsp = end sp = distance/ link dist时,匀速运动。
link axis: 参考轴的轴号,也就是主轴的轴号。
linkoptions: 连接模式选项,不同的二进制位代表不同的意义。
1 位0,连接精确开始于参考轴上MARK事件被触发的时刻。
2 位1,连接开始于参考轴到达一个绝对位置时。(见 link pos参数描述)
4 位2,当这位被设置时,MOVESLINK 会自动重复执行并且可以反向。(这个模式可以通过设置轴参数REP_OPTION 的第1位为1来清除)
16 位 4, 使用link offpos 从中间来启动,配合掉电中断实现恢复跟随。
32 位 5,只有参考轴的正向运动才连接。
256 位8,连接精确开始于参考轴上MARKB事件被触发的时刻。
link pos: 当linkoptions参数设置为2时,该参数表示参考轴在该绝对位置值时,连接开始。
link offpos:当link_options参数bit4置为1时,该参数表示主轴已经运行完的相对位置。
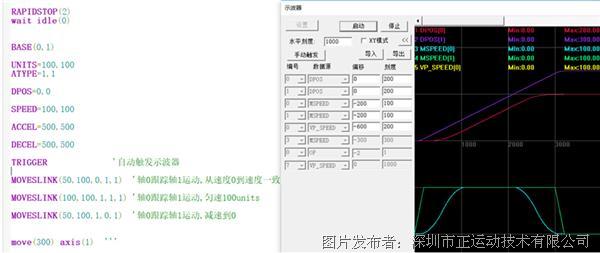
以上图moveslink为例,可以清晰看出主动轴1与从动轴0的位置与速度关系。
一.追剪
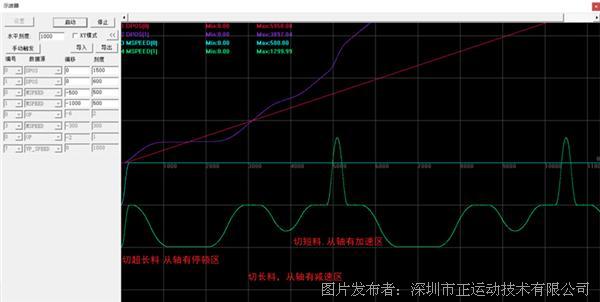
在无缝钢管生产线、送料装置为挤出机、纸吸管裁切设备等场合,或对生产效率有较高要求的应用场景,设备不允许间歇停止,上述传统设备便无法满足客户需求,由此需要引入追剪方案。 追剪就是在物料剪裁过程中,物料保持不间歇的传送,而裁断装置做往复运动,通过对裁断装置进行速度及位置规划,使得剪裁装置与物料速度达到同步时,所要剪裁的物料长度刚好满足预定要求,此时进行物料裁剪,剪裁动作完成后返回等待位置等待一定时间,之后再次追踪物料同步裁剪,周而复始。
以下举例说明:物料通过牵引轴(轴0的MSPEED0曲线)从左至右匀速运行,裁刀(轴1的MSPEED1曲线)从初始位置开始追踪物料到达同步区后进行裁剪动作,裁剪完毕后,裁刀快速返回至初始位置,等待一段时间后继续下一个动作循环。
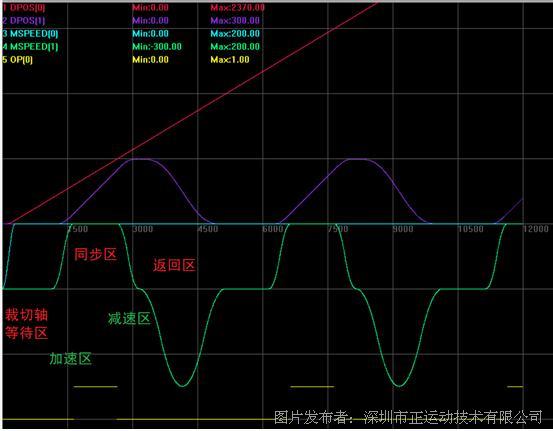
满足追剪要求的速度曲线如下图所示,图中轴0的MSPEED0为牵引轴速度,轴1的MSPEED1为裁剪轴速度。通过MOVESLINK指令即可实现该追剪动作流程。设轴0牵引轴为系统的主轴,轴1追剪电机为系统从轴。
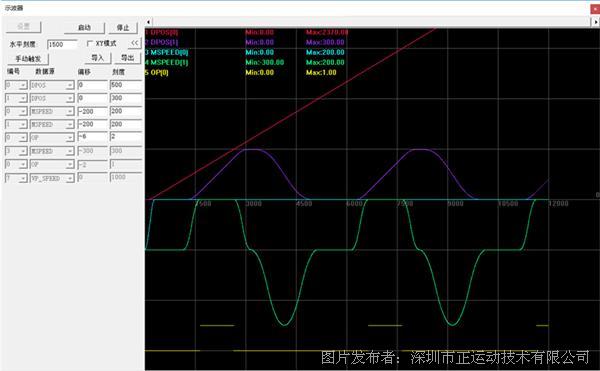
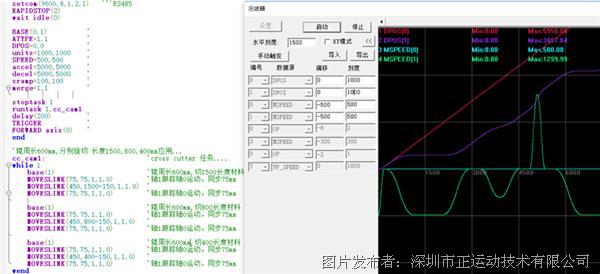
二.轮切应用
假设机械系统的版辊周长为600mm,切割材料为1500mm,800mm,400mm,按照切割材料长度与版辊周长的举例相比较分别为:切超长料,切长料,切短料,等3种模式。
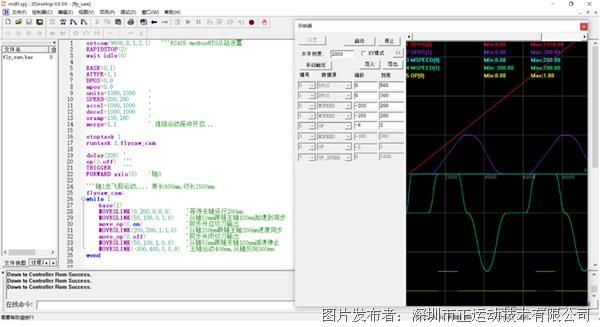
以下代码演示了:三种不同材料与切刀长度的速度曲线图。
三.绕线机/排线设备
更多凸轮应用详情请咨询正运动运动控制器厂家。




 投诉建议
投诉建议
提交

正运动全国产EtherCAT运动控制器ZMC432H用户手册

正运动全国产EtherCAT运动控制器ZMC432H

正运动技术运动控制器如何快速实现单轴/多轴同步跟随功能?

正运动ECI1408运动控制卡用户手册

正运动机器视觉运动控制一体机VPLC710