


AGV激光Slam导航环境要求说明
2019/6/21 11:38:29

V槽导航对接
本导航系统目前支持SLAM导航模式、V槽导航模式、磁条导航模式。
AGV工作时,可以根据场景,随时任意切换导航模式。使其导航精度和便利性达到应用要求。
注意:上述导航模式的核心区别是小车反馈位置的计算方式,在路径规划和控制的算法上相同的。
SLAM导航原理
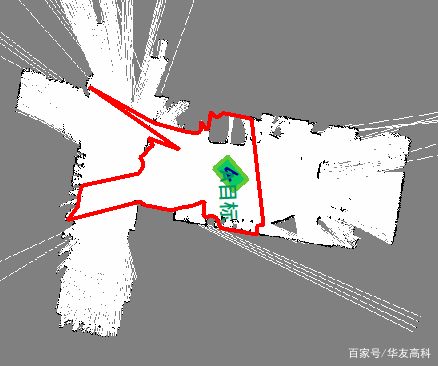
地图显示
地图:灰色是未知区域,白色是已知区域,深黑色是墙壁轮廓。
红色是激光数据轮廓。
SLAM导航精度和环境要求
1、根据AGV工作的路径,分析agv行走中,离墙壁等参照物的距离。要求激光雷达的探测距离足够远,可以探测到的轮廓的总长大于1米。还需要注意同一款激光雷达对于不同颜色的物体,其探测距离是不一样的。
如果在AGV在室外行走,建议选择室外专用雷达。
2、AGV行走过程获得的激光轮廓,相对于原始地图的理想轮廓的变化量小于40%,定位精度可以稳定在75px范围内。
当轮廓变化量过大时,因为激光数据对于编码器里程计的修复能力会下降,会导致随着AGV行走的距离,定位精度逐渐线性损失。但是不用担心AGV位置的突然远距离的跳变。
审核编辑(
王静
)




 投诉建议
投诉建议
提交
查看更多评论
其他资讯

ethercat一拖多驱动控制
激光导航AGV的停车精度受环境变化的影响