


EtherCAT总线运动控制器中简单易用的直线插补
本节课程主要通过几个部分讲解直线插补,分别为EtherCAT总线运动控制器介绍、 运动控制器直线插补的原理、功能、实现方式和例程仿真演示。
01 XPLC864E2介绍
XPLC864E2是正运动技术推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。
体积小,通讯功能全,支持RS232串口、RS485串口、网口、CAN总线、EtherCAT总线连接外设,多网口通道通过交换机扩展。
XPLC864E2支持脉冲轴和总线轴混合使用,总轴数为8,除了带EtherCAT接口之外,输出口可配置为8个脉冲信号输出,另带两路编码器输入,由输入口配置。
通过扩展最多支持12轴直线插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等功能。
02 直线插补原理
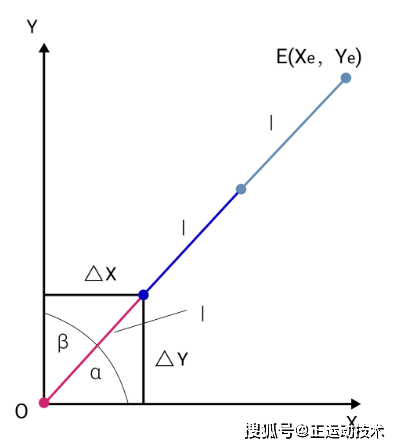
直线插补算法采用数据采样法,插补用小段直线来逼近给定轨迹,插补输出的是下一个插补周期内各轴要运动的距离,不需要每走一个脉冲当量就插补一次,可达到很高的进给速度。
数据采样法原理是采用时间分割思想,根据进给速度f和插补周期t,将廓型曲线分割成一段段的轮廓步长l,l=ft,然后计算出每个插补周期参与插补运动的每个轴的坐标增量。
03 直线插补功能
一、直线插补特点
直线插补运动通过BASE指令选择轴号/轴组,控制多轴联动,完成直线运动。
主轴是BASE选择的第一个轴,插补运动轴参数UNITS、SPEED等均采用主轴的参数,发送MOVE直线插补运动指令,插补运动在主轴的运动缓冲区中按顺序执行,CANCEL指令取消插补运动,实现急停。
1.支持16轴直线插补运动
base(0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15)
2.支持多通道同时插补
BASE(0,1)
MOVE(100,200)
BASE(2,3,4)
MOVE(30,40,50)
二、插补运动参数计算
以二轴直线插补为例:轴0和轴1两轴参与直线插补运动,如下图。
二轴直线插补运动从平面的A点运动到B点,XY轴同时启动,并同时到达终点,设置轴0的运动距离为∆X,轴1的运动距离为∆Y,主轴是BASE的第一个轴(此时主轴为轴0),插补运动参数采用主轴的参数。
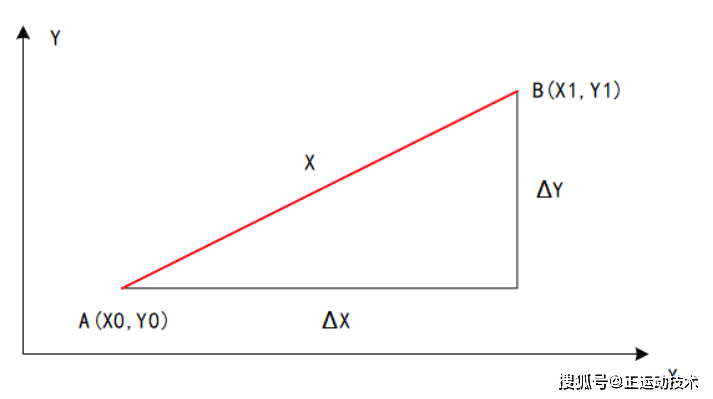
若插补主轴运动速度为S(主轴轴0的设置速度),各个轴的实际速度为主轴的分速度,不等于S,此时:
插补运动的距离:X=[(∆X)2+(∆Y)2]½
轴0实际速度:S0=S×∆X/X
轴1实际速度:S1=S×∆Y/X
04 直线插补实现
XPLC864E2内置直线插补算法,支持8个EtherCAT总线轴联合直线插补,可扩展支持12轴插补,采用MOVE直线插补指令,便可轻松高效完成插补运动。
一、直线插补相关指令
1.MOVE发送脉冲给驱动器,实现直线插补运动。
语法:
MOVE(distance1 [,distance2[,distance3 [,distance4...]]])
MOVEABS(distance1 [,distance2 [,distance3 [,distance4...]]])
MOVESP(distance1 [,distance2 [,distance3 [,distance4...]]])
MOVEABSSP(distance1 [,distance2 [,distance3 [,distance4...]]])
2.BASE指令选择参与插补的轴号,即MOVE运动发送给哪些轴。
语法: BASE(axis1 [,axis 2 [,axis 3 [,axis 4...]]])
3.直线插补运动速度比例自由控制,当前速度= SPEED*SPEED_RATIO。
语法: SPEED_RATIO(轴号) = value
4.运动暂停与恢复,MOVE_PAUSE暂停,MOVE_RESUME恢复运动。
语法: MOVE_PAUSE(mode)
5.运动取消,轴/轴组减速停止,CANCEL(2)为急停,RAPIDSTOP(2)为全部轴急停。
语法: CANCEL(mode) AXIS(主轴), RAPIDSTOP(mode)
二、直线插补类型
1.直线插补有以下三种形式可选:
(1)MOVE相对运动指令
插补运动的距离参数为与当前插补起点的相对距离,采用SPEED速度。
(2)MOVEABS绝对运动指令
插补运动的距离参数为相对于原点的绝对距离,在相对运动指令后方加上ABS后缀,采用SPEED速度。
(3)MOVESP/MOVEABSSP运动指令
带SP的指令运动速度采用FORCE_SPEED强制速度参数运动,而不是SPEED参数,在相对运动指令或绝对运动指令后方加上SP后缀即可。FORCE_SPEED参数能进入运动缓冲区,方便实现动态变速。
2.三类运动形式的区别采用下方例子展开说明:
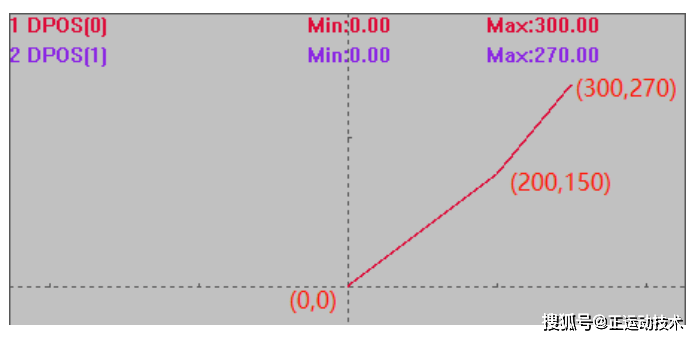
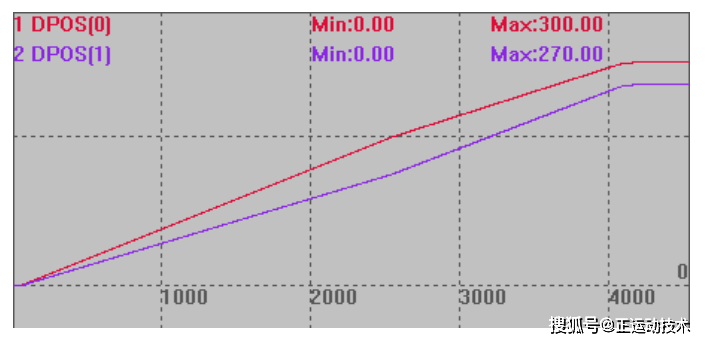
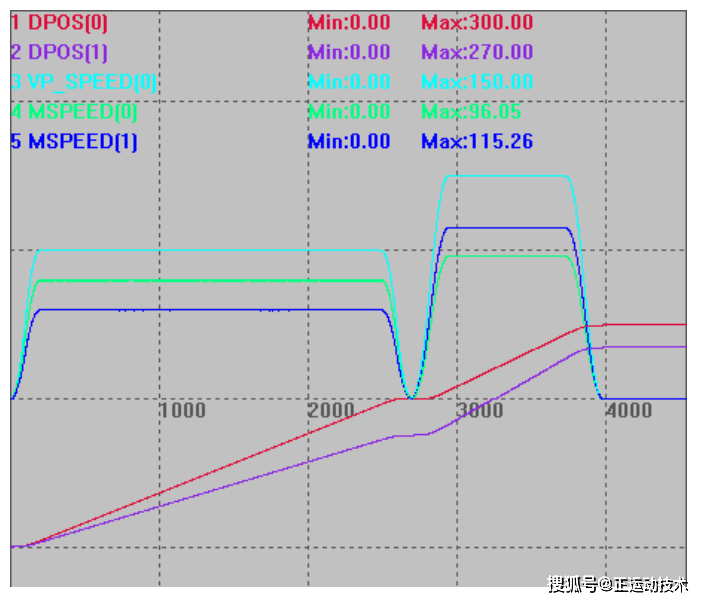
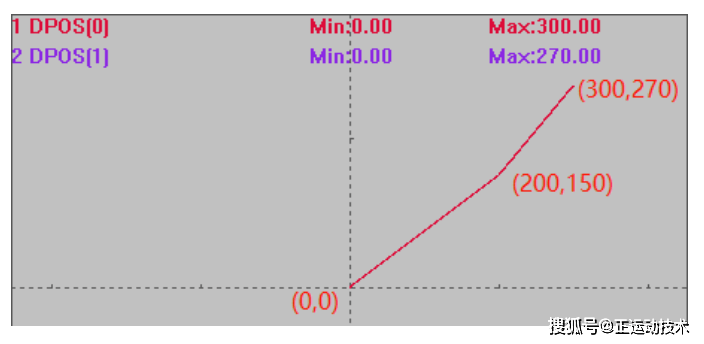
(1)相对运动例子
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1)
DPOS=0,0
ATYPE=1,1
UNITS=100,100
SPEED=100,100 '运动速度
ACCEL=1000,1000
DECEL=1000,1000
FORCE_SPEED=150,150 'SP指令速度
SRAMP=100,100 'S曲线
TRIGGER '自动触发示波器
MOVE(200,150) '第一段终点(200,150)
MOVE(100,120) '第二段终点(300,270)
END
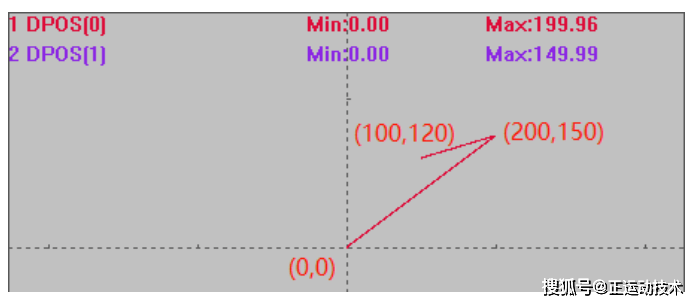
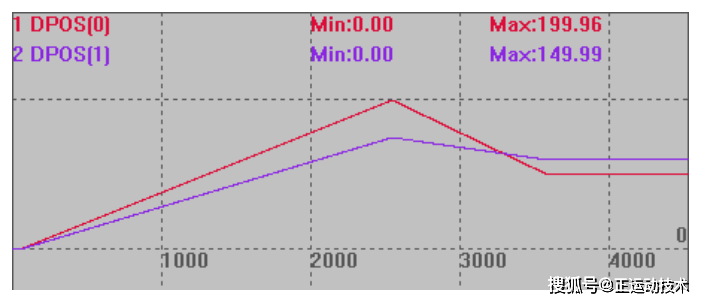
(2)绝对运动例子
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1)
DPOS=0,0
ATYPE=1,1
UNITS=100,100
SPEED=100,100 '运动速度
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100 'S曲线
TRIGGER '自动触发示波器
MOVEABS(200,150) '第一段
MOVEABS(100,120) '第二段运动到绝对位置(100,120)
END
(3)SP运动指令例子
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1)
DPOS=0,0
ATYPE=1,1
UNITS=100,100
SPEED=100,100 '运动速度
ACCEL=1000,1000
DECEL=1000,1000
FORCE_SPEED=150,150 'SP指令速度
SRAMP=100,100 'S曲线
TRIGGER '自动触发示波器
MOVE(200,150) '第一段相对运动,速度100
MOVESP(100,120) '第二段SP相对运动,速度150
END
三、MOVESP动态变速
MOVESP直线插补运动采用FORCE_SPEED设置的速度运动,并且支持STARTMOVE_SPEED自定义每段SP运动的开始速度,ENDMOVE_SPEED自定义每段SP运动的结束速度,这两个参数不使用时请设置较大值。
例子:
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1) '选择XY
DPOS = 0,0
MPOS = 0,0
ATYPE=1,1 '脉冲方式步进或伺服
UNITS = 100,100 '脉冲当量
SPEED = 100,100
ACCEL = 200,200
DECEL = 200,200
SRAMP=100,100 'S曲线
TRIGGER
'第一段
FORCE_SPEED = 50 '第一段速度50
MOVESP(40,40)
'第二段
FORCE_SPEED = 60 '第二段速度60
MOVESP(50,50)
'第三段
FORCE_SPEED = 80 '第三段速度80
MOVESP(60,60)
END
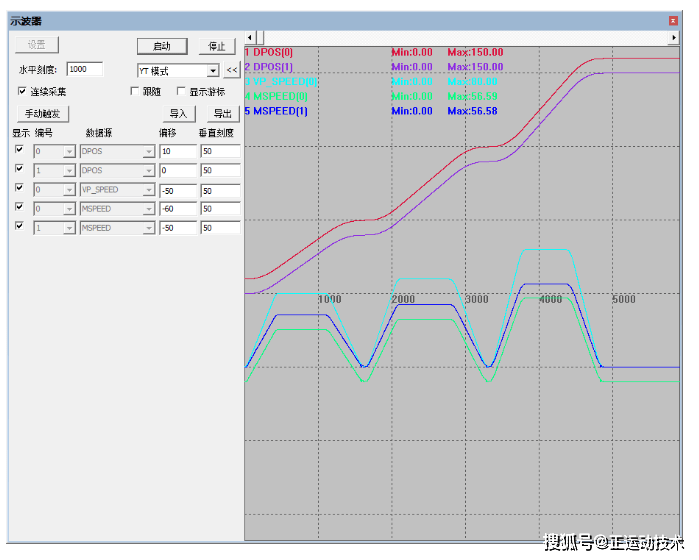
速度变化曲线:
从速度为0开始运动,完成三段直线插补运动,第一段插补的运动速度50,第二段运动速度60,,第三段运动速度80。
四、直线插补的速度倍率控制
直线插补运动中支持SPEED_RATIO设置当前运动速度的比例,使得当前运动速度=SPEED* SPEED_RATIO,指令发送立即生效,故可借助此命令实现动态变速。
例子:
RAPIDSTOP(2)
WAIT IDLE
BASE(0,1) '选择轴0,1
DPOS=0,0
UNITS=1000,1000
SPEED = 100,100 '速度100units/s
ACCEL = 1000,1000
DECEL = 1000,1000
SRAMP = 50,50
TRIGGER
SPEED_RATIO = 1 '速度比例为1,速度100
MOVE(100,120) '直线插补
DELAY(500) '等待0.5s
SPEED_RATIO = 2 '速度200
WAIT UNTIL REMAIN<50 '等待剩余距离小于50
SPEED_RATIO = 0.5 '速度降为50
WAIT IDLE
SPEED_RATIO=1
END
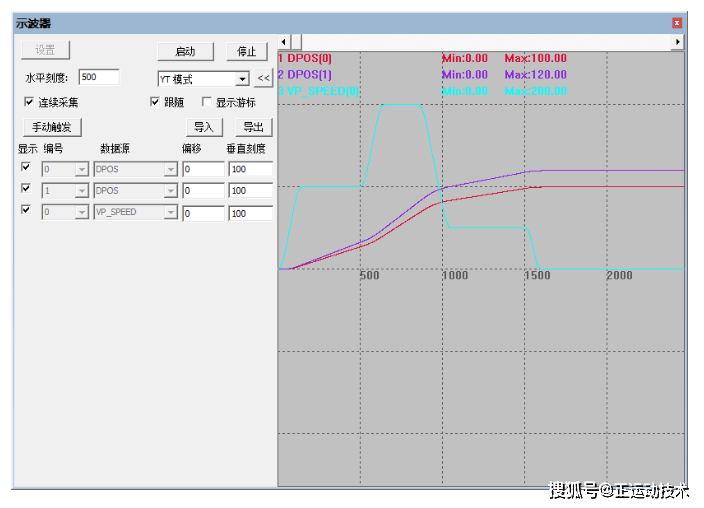
速度变化曲线:
五、直线插补运动暂停与恢复
MOVE_PAUSE运动暂停适用于插补运动,有以下几种模式:
例子:
BASE(0,1) '选择轴0,1
DPOS=0,0
UNITS=1000,1000
SPEED = 100,100 '速度100units/s
ACCEL = 1000,1000
DECEL = 1000,1000
SRAMP = 50,50
TRIGGER
MOVE(100,100) '当前运动
MOVE(50,50) '缓冲运动
MOVE_PAUSE(1) '模式1,当前运动完成暂停
DELAY(2000)
MOVE_RESUME '恢复运动,缓冲运动开始执行
END
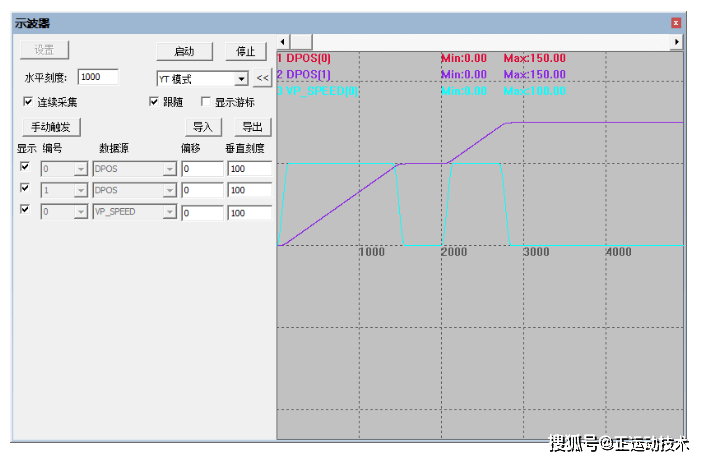
运动曲线如下图:
05 直线插补例程
一、两轴连续插补完成五角星轨迹
'总线初始化使能EtherCAT总线驱动器,脉冲型驱动器OP打开使能。
BASE(0,1)
UNITS=10000,10000
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100
DPOS=0,0
MPOS=0,0
TRIGGER '自动触发示波器
'五角星轨迹
MOVEABS(1.4695, 1.0676)
MOVEABS(2.9389, 0.0000)
MOVEABS(2.3776, 1.7275)
MOVEABS(3.8471, 2.7951)
MOVEABS(2.0307, 2.7951)
MOVEABS(1.4695, 4.5225)
MOVEABS(0.9082, 2.7951)
MOVEABS(-0.9082, 2.7951)
MOVEABS(0.5613, 1.7275)
MOVEABS(0.0000, 0.0000)
END
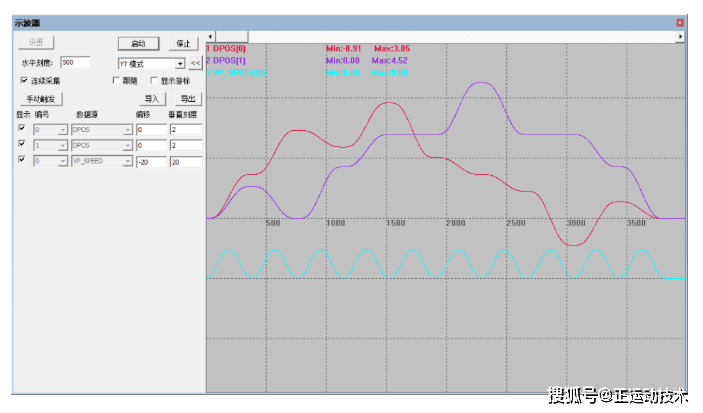
示波器采样运动随时间变化的波形:
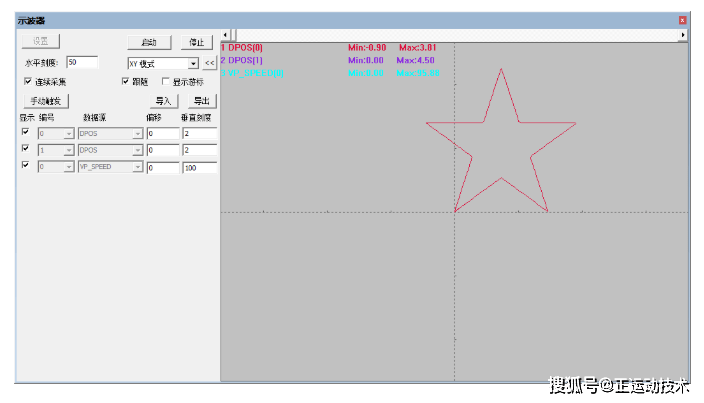
示波器采样两轴插补轨迹:
二、五角星视频演示
本次,正运动技术EtherCAT总线运动控制器中简单易用的直线插补,就分享到这里。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。 文章版权归正运动技术所有,如有转载请注明文章来源。




 投诉建议
投诉建议
提交

正运动全国产EtherCAT运动控制器ZMC432H用户手册

正运动全国产EtherCAT运动控制器ZMC432H

正运动技术运动控制器如何快速实现单轴/多轴同步跟随功能?

正运动ECI1408运动控制卡用户手册

正运动机器视觉运动控制一体机VPLC710