


设计仿真 | Adams接触定义指南(五):柔性体接触及技巧
柔性接触方程是基于线性柔性体的模态求解的方式进行建立的。柔性体的实时节点位置是通过模态叠加的方式进行计算。接触计算中,柔性体的三角形网格被视为小的面几何。柔性体接触位置的计算与刚性体接触位置的计算方法一样,均使用同样的技术,参考接触指南(一)。柔性体的接触应用IMPACT方法计算接触力,罚函数的方法不再支持柔性体的接触定义。本文主要针对柔性体的接触理论、接触计算的方法以及接触参数的设置进行阐述。
01
柔性体接触的理论
柔性体接触理论主要把包括如下几个方面:

02
柔性体接触计算的原理
不管是刚体、柔性体、2D或者3D单元,接触力的计算均需要渗透深度作为接触函数的输入,从而得到接触过程中的接触力。
接触类型为柔性体与柔性体的接触类型时,几何通过每个物体的曲面节点的网格定义。而有限元网格的节点被分组成三角形。当柔性体接触时,将会形成一个相交的空间区域。只有该相交区域内的节点,会产生接触的作用力。而总的接触力会分布到各个节点上,节点的接触力的大小与各个节点的渗透深度成正比关系。
当相交空间的区域内I柔性体与J柔性体各自节点的数量不一样时,这种情况并不会影响接触力的计算。因为柔性体的相关接触关系,需要保证整个接触区域的接触力合力大小相等方向相反。而节点数量不一致,并不违反上述的要求。
03
柔性体接触的限制
01柔性体的接触定义是基于线性理论,对于大变形的接触,结果精度相比实际会有一定的出入;
02柔性体接触定义类似于使用接触函数,而接触函数是一个非线性弹簧阻尼器。对于接触应力的获取,推荐应用非线性有限元进行分析;
03柔性体是基于模态的方法建立的,意味着接触力的求解是基于模态振型求解的,故在进行有限元mnf输出时,需要确保柔性体的模态数量能够满足分析的工况;
04可以应用模态应力恢复得到柔性体的应力,但需要拥有Adams/Durability的license;
05柔性体的接触计算需要应用C++求解器,同时只支持IMPACT方法。
04
柔性体接触参数的设置
柔性体的接触参数的设置方法可参考刚体的接触参数的设置方法。
■接触刚度

■ 接触力指数

■ 最大渗透深度

■ 最大接触阻尼Cmax

05
接触求解设计技巧
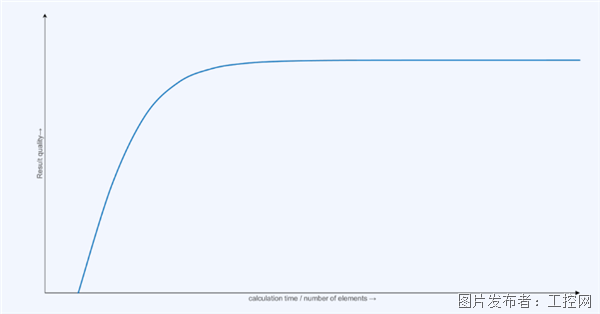
01为了避免模型文件过大,可在输出柔性体的过程中,只保留柔性体接触区域的网格,非接触区域定于为PLOTELs单元,或者应用Adams/Flex工具对柔性体文件进行优化(参考“应用AdamsFlex处理模态中性文件-上篇”)
02尝试应用误差为0.01的SI2积分器或者默认误差值1E-5或者更小的误差的HHT积分器;
03初始仿真,可将输出步长定义为0.001,如果运行很好,可进一步增加步长;
04可尝试将校正器corrector从origin调节为modified类型;
05由于低阶次的积分器相比于高阶次积分器更为稳定,可以将积分器中的最大阶次Kmax设置为2;
06防止积分器应用更大的积分步长,将HMax设置为较小的数值,避免因为积分步长过大而出现报错问题;
07设置插值方式Interpolate=On,这种设置不会强制积分器步长与输出步长一致;
08为避免生成过多无用的接触类数据,减少结果文件的输出,可将Save Files调节为No。

图1 求解器的设置




 投诉建议
投诉建议
提交

会议通知 | 关于召开全国智能检测与先进制造行业产教融合共同体2024年会
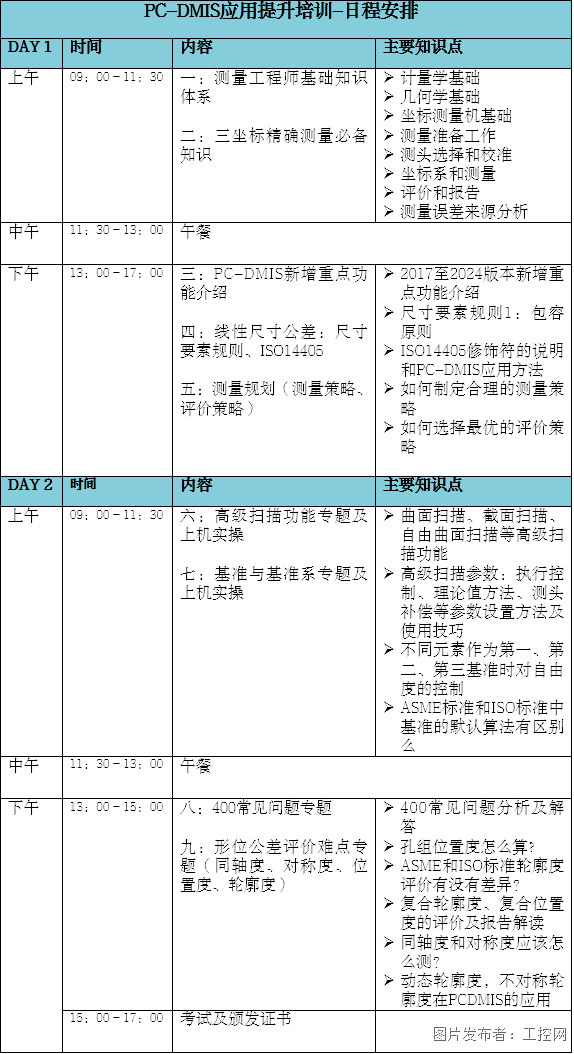
线下培训 | PC-DMIS应用提升年终培训,12月28日-29日,青岛开班!

生产制造 | 数控加工仿真-NCSIMUL如何设置角度头刀具

线下培训 | VTD & Cradle CFD免费培训正在报名中
设计仿真 | Simufact Welding焊接工艺仿真网格划分技巧