


设计仿真 | Simufact Welding焊接工艺仿真网格划分技巧
1网格划分基本概述
对于每个有限元(FE)仿真而言,必须将连续工件空间离散化为有限数量的单元。这些单元代表了真实工件的质量、刚度等方面的物理特性。空间离散化也称为网格划分。通常,网格划分由网格生成器执行。网格对整个求解分析起着至关重要的左右,主要体现在以下几个方面:
01网格数量影响到求解的精度和效率
常规来说,在电脑配置足够的情况下,网格数量越多,模拟得到的结果越为精确,但是当网格数量达到一定数量后,结果精度不再随着网格数量的增加而增加,并且求解时间也越久,通常情况下,我们需要平衡整个求解过程的求解效率和求解精度,这就需要我们控制网格数量。

02网格类型影响计算结果
不同的求解类型需要的网格类型是不一样的,在焊接模拟分析中,我们常用的网格单元是六面体单元,但有时候也会因为模型的复杂程度,选择不同的采用四面体单元进行模拟分析。
03网格连续性
在实际焊接过程中,各零部件间是相互接触的,可能随着焊接的进行而分离,在大部分模拟软件中,会要求保证各零件间的网格连续性,即节点耦合,但这不仅仅脱离了实际焊接过程中的情况,也会极大的增加焊接网格划分的工作量,在Simufact Welding软件中,其基于Marc的专业求解器,基于其优异的非线性求解分析功能和强大的网格自适应接触功能,能够使得各零部件间的网格不连续,即各零件间单独进行网格划分,无需进行网格连续的操作划分。

Simufact Welding的网格不连续功能
2Simufact Welding网格类型
在Simufact Welding中,我们常用的实体网格类型共有4种,分别为:六面体 (7)、实心壳体(185)、四面体(157)、四面体(134)。

一般而言,六面体单元精度是最好的,同时单元数量也较少。但不是每一个几何体都适合用六面体单元来进行网格划分。如果因为几何形状的太复杂而不能创建六面体网格,则应该使用四面体(157)单元。四面体(157)单元在其中心多一个的节点,并且其他节点都具有附加的压力自由度。因此四面体(157)单元比四面体(134)单元更精确。

Simufact Welding软件还具有专业的网格划分工具,包括支持六面体Hexmesh网格、钣金零件的Sheetmesh网格、四面体单元的Tetmesh网格、单独针对环形零件的Ringmesh网格,用户也可以根据自身的实际情况,选择其他的网格划分工具,软件支持专业的网格格式,例如*BDF、*ARC等。
3Simufact Welding网格细化功能
前文提到,为了保证零件的计算精度和计算效率,我们通常需要对网格数量进行控制,而常规的网格控制方法,即为局部进行网格细化和粗化。在Simufact Welding软件的焊接模拟过程中,我们通常只需要关注焊缝区域和热影响区域的网格质量,我们需要将这两个区域的网格进行细化,而母材区域的网格,我们则不需要进行细化,进而控制住整体零件的网格数量。

全局: 一个单元尺寸用于整个部件(最差案例)

局部:在焊缝附近局部细化
(较好, 但是对于长焊缝的大型模型,速度较慢)

自适应: 在使用Simufact Welding 时 模拟中自动细化
(较好,但是不要超过2个细化级别)
在常规零件模拟过程中,若网格数量较少,我们可以选择整体零件采用一种尺寸;但针对大部分焊接零部件,因为其模型较大,我们推荐在网格划分时,对焊缝区域和热影响区域进行网格细化,保证其整体网格数量,在时间和计算机允许的情况下,可以选择Simufact Welding软件的自动细化/粗化功能,能够极大的减少我们进行网格细化的工作;若网格数量特别巨大,例如>50万时,推荐使用Simufact Welding软件的自动细化/粗化功能。
Simufact Welding软件还具有细化框功能,能够根据用户的手动设置细化框大小,自动细化局部区域。

Simufact Welding细化框
4Simufact Welding网格划分原则
01网格大小控制原则
在Simufact Welding焊接模拟仿真过程中,针对其网格划分,因为其模拟精度和质量主要依据于焊缝区域和热影响区域的网格,所以我们在进行相关工作时,主要基于下列两个原则:
1、组件厚度;厚度方面的问题,如果宽高比大于 1:8 ,即最小单元边到一个单元的最大单元边。如果超过这个宽高比,这个单元的刚度会很差,并且会产生不良的结果,并且可能会增加计算时间(模拟可能会变得不稳定)。常规在Simufact Welding软件中,我们推荐采用1:3以下的比例,适当的可以放宽到1:5。
2、焊缝/热源尺寸;为了捕获合理数量的积分点并具有恒定的瞬态模拟热通量,我们通常需要将单元尺寸调整为热源尺寸,遵循以下原则:宽度(b): 2 - 3 单元 (每一边) 、长度(af+ar):3 - 4 单元、深度(d): 2 - 3 单元;

热源示意图
例如:

我们通过检查焊缝,发现其右侧焊脚高度为10mm、左侧焊接高度为15mm,此时我们可以选择:
1、焊脚为10mm的焊缝,我们可以选择网格尺寸为5mm或者3.3mm(即2~3层网格);
2、焊脚为15mm的焊缝,我们可以选择网格尺寸为7.5mm或者5mm;
上述的方式,我们可以根据相应的原则来进行网格划分,但很多时候,因为焊缝较多且为了避免进行重复性的复杂网格划分,我们可以选择4mm作为折中的快速焊缝网格划分。
02网格质量控制原则
较大的畸变网格或者不合理的网格大小比例,都会影响到Simufact Welding软件的模拟质量,因此在进行网格过渡、细化、接触区域网格划分时,需要进行注意,主要涉及到以下几点:
1、避免较大扭曲单元,这种类型的单元刚度系数较差,将会导致模拟不稳定,很容易产生网格穿透的畸变网格(单元的插值点将在单元外)。

尖锐网格
2、避免直接从焊缝处进行粗化过渡。如直接进行过渡,在模拟时该区域的温度梯度将会变得很差

焊缝处直接进行粗化过渡

合理平滑网格模拟结果
3、控制相邻网格大小比例≤2:1。若两个部件间的单元比率较差,模拟将会变得非常不稳定,可能会崩溃。

相邻网格比例过大
4、接触区域网格,避免双重交叉。因为Simufact Welding能够进行网格不连续的模拟分析,但在接触区域,若网格发生双重交叉穿透,也会影响模拟精度和收敛性,左侧为良好的网格接触情况,右侧为差的网格接触状态。

接触区域网格示例
5、避免模型间的干涉穿透。在实际的CAD模型中,容易出现模型间的穿透和交叉,再此情况下,我们需要进对CAD模型进行优化调整;

干涉模型




 投诉建议
投诉建议
提交

会议通知 | 关于召开全国智能检测与先进制造行业产教融合共同体2024年会
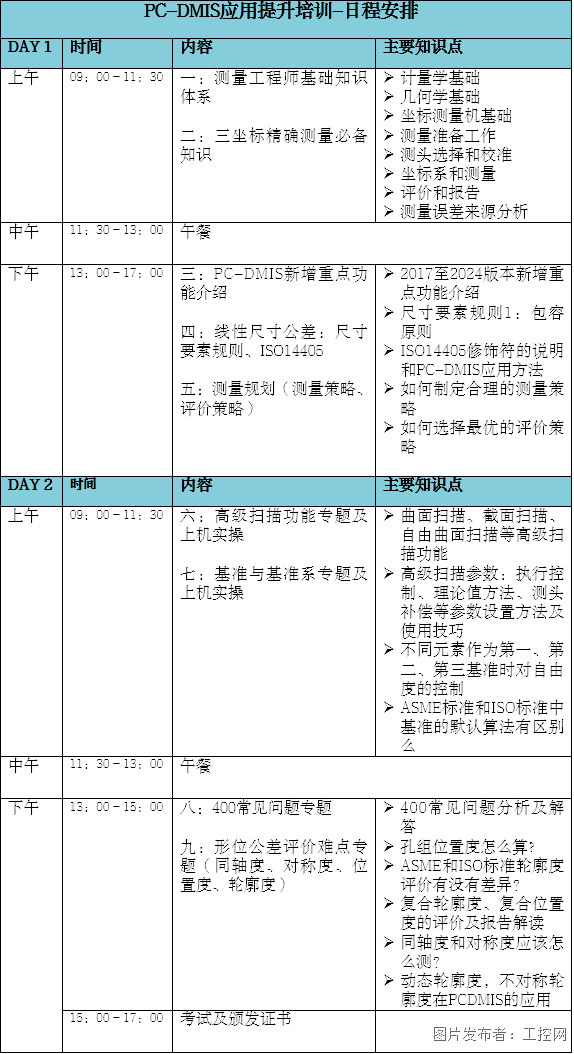
线下培训 | PC-DMIS应用提升年终培训,12月28日-29日,青岛开班!

生产制造 | 数控加工仿真-NCSIMUL如何设置角度头刀具

线下培训 | VTD & Cradle CFD免费培训正在报名中

质量管理 | 离散制造业质量数据管理方案